![]()
The field of robotics is ever growing with state spaces exploding due to their complexity. With increasing complexity and the asynchronous nature of modern programs, comes the demand for more robust testing. Current unit testing methods only cover a portion of code, do not efficiently search the entire state space, and often leave interleavings due to concurrency untested. The P programming language is a modeling language and set of associated tools aimed at helping to create modular and safe distributed systems.
P is a state machine based programming language for modeling and specifying complex distributed systems. P allows programmers to model their system as a collection of communicating state machines. P supports several backend analysis engines such as model checking and symbolic execution. P can be systematically tested and compiled into executable code. Combining P with MavSDK, which is a collection of libraries to interface with the MAVLink drone messaging framework, creates a powerful simulation and testing environment for drone robotics systems. MavSDK can manage one or more vehicles via MAVLink. MavSDK communicates with the PX4 flight stack and all testing is done against PX4. Coupled with QGroundControl, a full simulation environment can be set up to test a distributed drone system before real-world deployment.
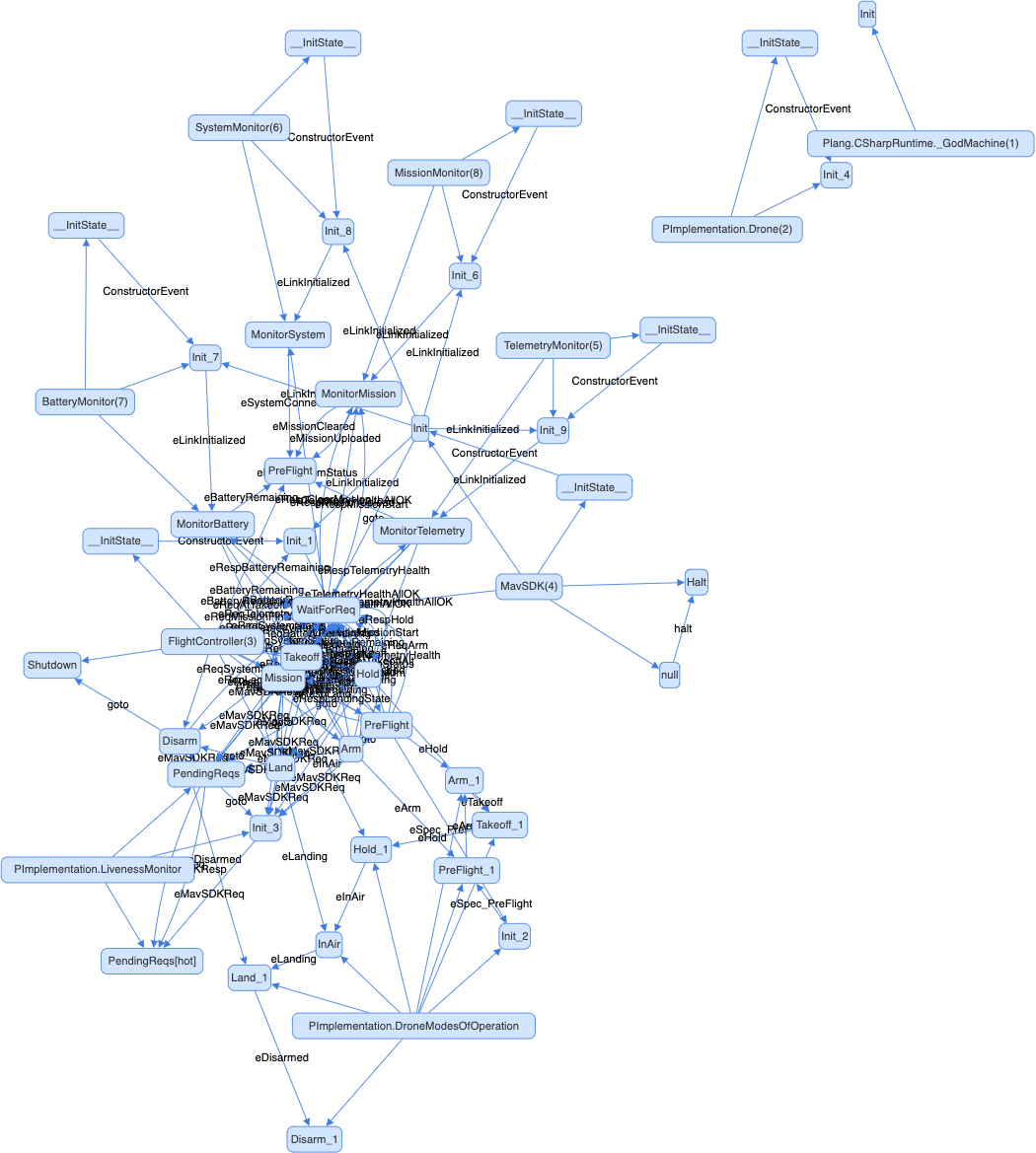
State machine of a drone using MAVSDK and the P programming language.
MAVSDK 1.4.4
VUISIS/P 1.1.4
DOTNET 3.1
Clone Repo
git clone [email protected]:VUISIS/PFlight.git --recursive
Install Dotnet
wget https://packages.microsoft.com/config/ubuntu/21.04/packages-microsoft-prod.deb -O packages-microsoft-prod.deb
sudo dpkg -i packages-microsoft-prod.deb
rm packages-microsoft-prod.deb
sudo apt-get update; \
sudo apt-get install -y apt-transport-https && \
sudo apt-get update && \
sudo apt-get install -y dotnet-sdk-3.1
Install Java
sudo apt install default-jre
Install P & Coyote
dotnet tool install --global P --version 1.1.4
dotnet tool install --global Microsoft.Coyote.CLI --version 1.0.5
Build P C# Program
cd CSharp
pc -proj:FlightSystem.pproj
Run Test Program Cases
coyote test ./POutput/netcoreapp3.1/FlightSystem.dll -m PImplementation.CheckDroneState.Execute -i 1 -v
coyote test ./POutput/netcoreapp3.1/FlightSystem.dll -m PImplementation.FailDroneState.Execute -i 1 -v
Build P C Program
cd C
pc -proj:FlightSystem.pproj
Install CMake
sudo apt install cmake
Install Python3 Future
pip3 install future
Note: Install globally. May need sudo.
Build MavSDK
cd Ext/MAVSDK
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=../../build/MAVSDK/install -B../../build/MAVSDK -H.
cmake --build ../../build/MAVSDK --target install
Build P C Static Library
cd Ext/P/Src
cmake -DCMAKE_INSTALL_PREFIX=../../../build/P/install -B../../../build/P -H.
cmake --build ../../../build/P
Build FlightSystem C Program
mkdir -p build/FlightSystem
cd build/FlightSystem
cmake -DCMAKE_PREFIX_PATH=../MAVSDK/install/lib/cmake/MAVSDK ../../C
make -j$(nproc --all)
Running Simulation
Install Docker
https://docs.docker.com/engine/install/ubuntu/
Install & Run QGroundControl
https://docs.qgroundcontrol.com/master/en/getting_started/download_and_install.html
Run PX4 Docker
docker run --rm -it --env PX4_HOME_LAT=36.144809502492656 --env PX4_HOME_LON=-86.79316508433672 --env PX4_HOME_ALT=5.0 jonasvautherin/px4-gazebo-headless:1.12.1
Run FlightSystem
build/FlightSystem/FlightSystem
Running With Docker
# Pull the image
docker pull saj122/pflight:quadrotor
# Launch QGroundControl
# Pull the jonasvautherin/px4-gazebo-headless:1.12.1 image and run it
docker run --rm -it --network host --env PX4_HOME_LAT=36.144809502492656 --env PX4_HOME_LON=-86.79316508433672 --env PX4_HOME_ALT=5.0 jonasvautherin/px4-gazebo-headless:1.12.1 <MAIN_IP_ADDRESS> 127.0.0.1
# Pull saj122/pflight:quadrotor image and run it
# Omit the —platform linux/amd64 flag if running on a x86_64 system.
docker run -it --rm --name flight_sim -w /PFlight/build/FlightSystem --network host --platform linux/amd64 saj122/pflight:quadrotor FlightSystem