Home
[TODO] for final submission
Few possible reasons.
- There is missing apt dependent package. Try to "google" what is missing and install it.
- Racing conditions due to multithreading cmake. Try to rebuild the workspace by deleting the devel and build folder. Use
catkin_make -j1. - Make sure you install all recommended apt packages. A list of ros package names was extracted from my working computer.
Remove the gazebo_ros_pkgs in learning_ros_external_pkgs_noetic. Recently the ros-noetic-gazebo-ros-pkgs apt deb package is up-to-date and that one from learning_ros_external_pkgs_noetic is outdated. You should rebuild your workspace for safe. Take a break and it should take more than a while.
rm -rf $HOME/5755_ws/src/learning_ros_external_pkgs_noetic/gazebo_ros_pkgs
rm -rf $HOME/5755_ws/devel
rm -rf $HOME/5755_ws/build
catkin_make -j1
ubuntu hostname resolving issue. See my wiki section
Two options.
- Keep your code written in python
-
catkin_make --only-pkg-with-deps ar_track_alvaronly compile specified package. Here the example is "ar_track_alvar". Later you need this commandcatkin_make -DCATKIN_WHITELIST_PACKAGES=""to go back full scan and compile.
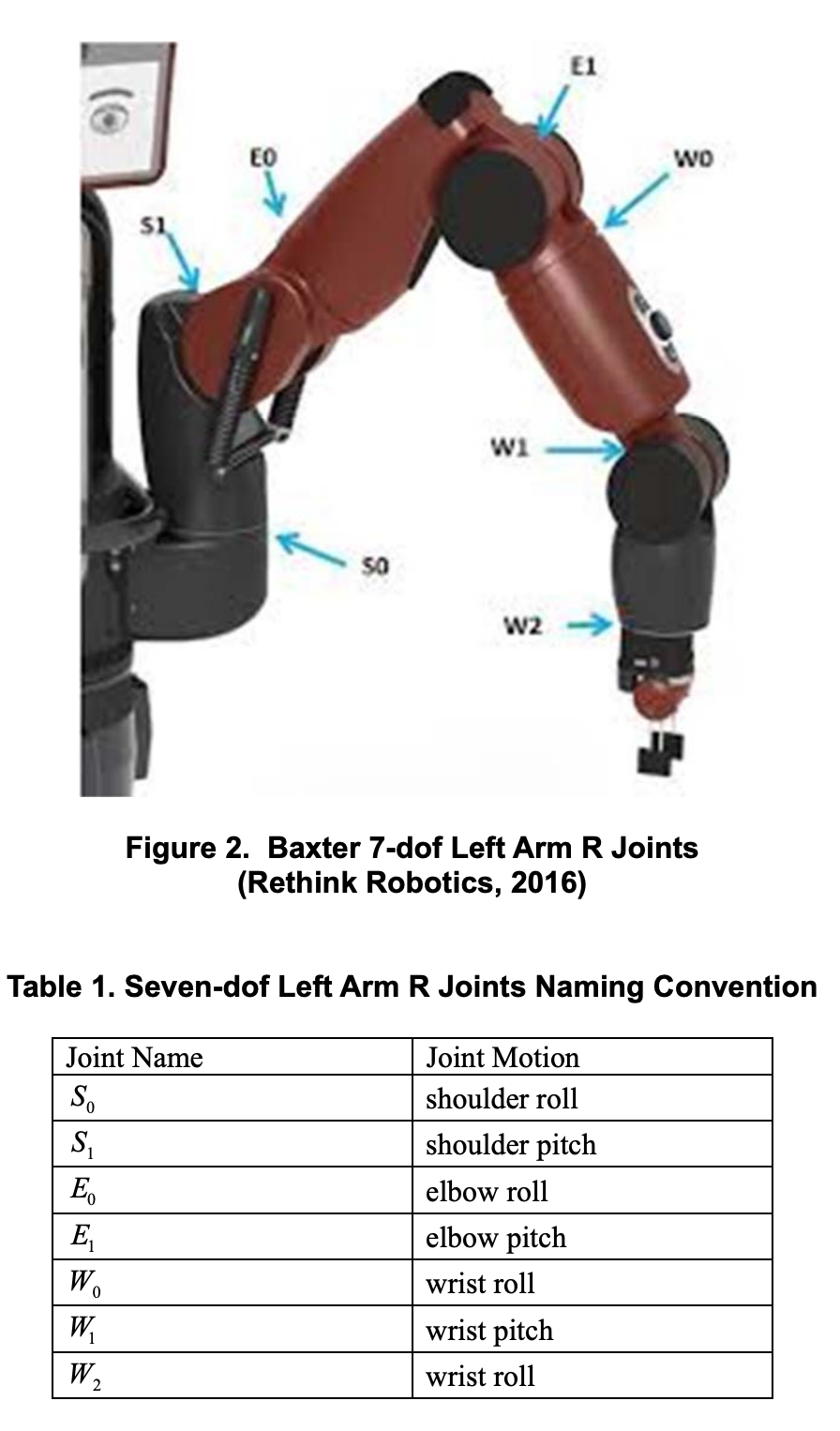
['head_pan']
['left_s0', 'left_s1', 'left_e0', 'left_e1', 'left_w0', 'left_w1', 'left_w2', 'l_gripper_l_finger_joint', 'l_gripper_r_finger_joint']
['right_s0', 'right_s1', 'right_e0', 'right_e1', 'right_w0', 'right_w1', 'right_w2', 'r_gripper_l_finger_joint', 'r_gripper_r_finger_joint']
The view_frames node was implemented in Python and was targeted on Python2. A patch for python3 is here
Error message
rosrun tf view_frames
Listening to /tf for 5.0 seconds
Done Listening
b'dot - graphviz version 2.43.0 (0)\n'
Traceback (most recent call last):
File "/opt/ros/noetic/lib/tf/view_frames", line 119, in <module>
generate(dot_graph)
File "/opt/ros/noetic/lib/tf/view_frames", line 89, in generate
m = r.search(vstr)
TypeError: cannot use a string pattern on a bytes-like object
8. moveit_calibration (HandEyeCalibration plugin) from rviz failed to solve after taking 5 samples. Why?
"handeye" and "baldor" ROS packages are needed as run-time dependencies but there are no clear error messages nor compilation warning. Those packages are now included in our repo. Checking out them and perform catkin_make could solve this.
The clock of the computer inside real baxter robot is not synced. Generally the robot would perform time sync through the internet using NTP. However if the robot is not connected to the internet you may want to setup your own NTP service in your workstation and let baxter connects to it.