Replies: 10 comments 16 replies
-
|
In the coming days, Pull Requests will be submitted to the Autoware repositories to apply Agnocast to the following two topics.
|
Beta Was this translation helpful? Give feedback.
-
|
Thanks, this looks interesting, but I have few questions:
|
Beta Was this translation helpful? Give feedback.
-
As stated in the post description, the default build command (colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release) produces exactly the same build artifacts as before. Therefore, regardless of how the launch file is written, it will continue to work without any issues. If you build with Agnocast Enabled while keeping the launch file unchanged, Autoware will terminate with an error message prompting you to modify the launch file for Agnocast.
As stated in the post description, Agnocast is not an RMW implementation but a middleware that exists independently and in parallel with the ROS 2 technology stack. Therefore, it is unrelated to the RMW_IMPLEMENTATION environment variable. Regardless of which middleware is set for RMW_IMPLEMENTATION, Agnocast will function alongside it without any issues. I also want to collaborate with the ROS community, but I do not intend to undergo a design review in the near future. However, In the long term, I aim to promote the adoption of Agnocast within the ecosystem. |
Beta Was this translation helpful? Give feedback.
-
|
@sykwer this looks really cool. It'd be good to reach out to the ROS 2 community as soon as possible to obtain feedback. I agree with @mitsudome-r that aligning ourselves with the ROS 2 community will benefit us in the long term, especially with maintaining the project and hopefully influence the design of |
Beta Was this translation helpful? Give feedback.
-
|
For large static-sized messages, how does it compare to iceoryx? |
Beta Was this translation helpful? Give feedback.
-
|
This is a fundamental evaluation of communication latency among Agnocast, IceOryx, and CycloneDDS, conducted as part of our paper under review. In a no-load environment, we placed the Publisher Node and Subscriber Node in separate processes and plotted the time from when a message was published to when the subscription callback began execution. The visualization shows how latency changes as the message size varies between 1 KB, 10 KB, 100 KB, and 1 MB. IceOryx achieves zero-copy communication for the static-sized message type, whereas copies occur for unsized message types. Therefore, we considered IceOryx with unsized messages and IceOryx with static-sized messages of the same size as separate comparison targets. As a result, Agnocast was the only option where latency remained constant as message size increased when handling unsized message types. At a message size of 1 MB, IceOryx had a communication latency close to 1.0 ms, whereas Agnocast remained below 0.1 ms. Since Autoware's PointCloud2 topics can exceed 10 MB, the latency gap is expected to widen even further. 
|
Beta Was this translation helpful? Give feedback.
-
|
For static-sized message types, as shown in the figure, IceOryx also exhibits constant communication latency. In the case of Agnocast, its IPC mechanism is the same for both static-sized and unsized message types, meaning it demonstrates the same latency characteristics for static-sized message types as depicted in the figure. (We have many other fundamental evaluation results, but since they contain substantial content from our paper under review, we will explain them directly in a meeting.) |
Beta Was this translation helpful? Give feedback.
-
|
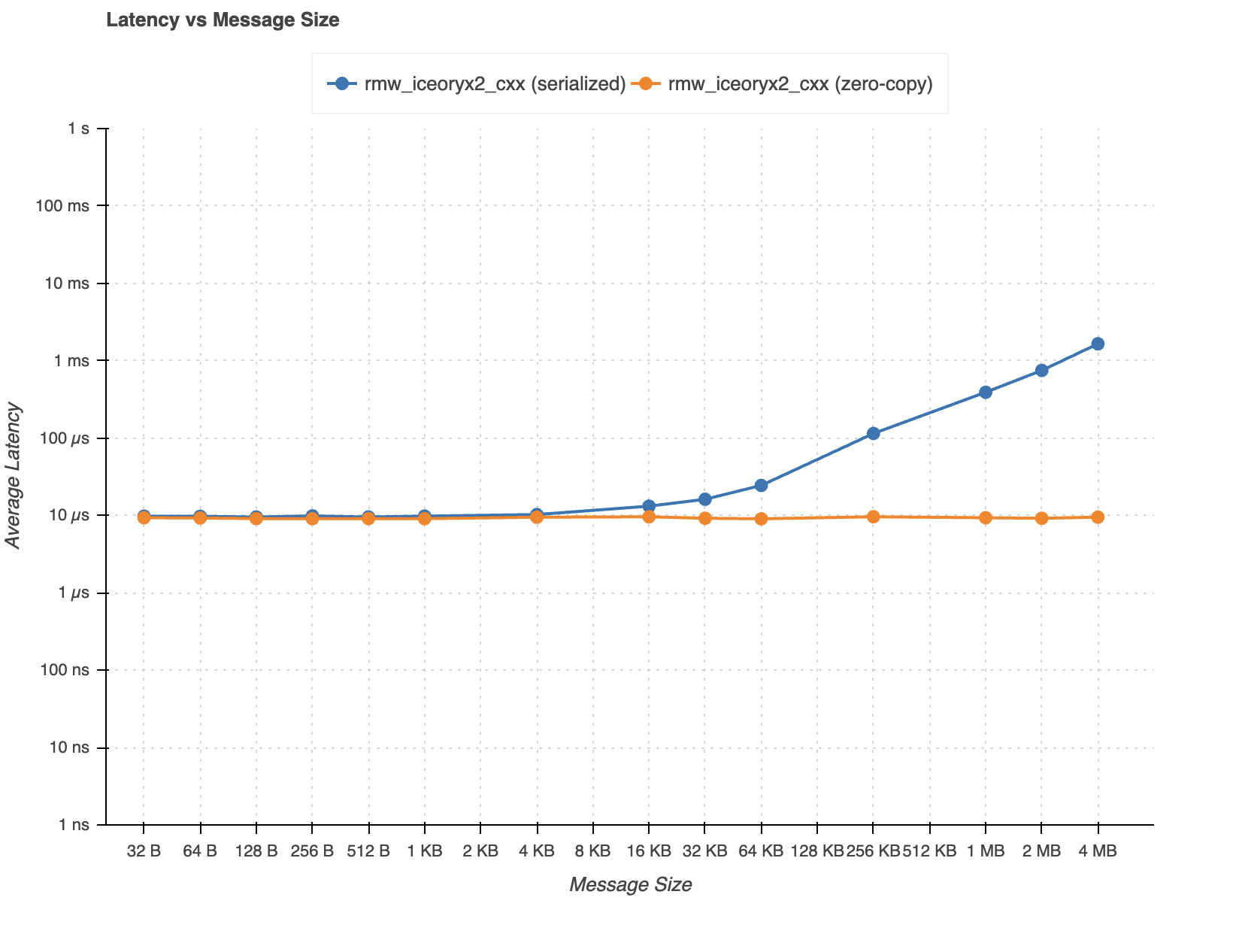
Wow! From this analysis, it looks like that Agnocast is faster than even the static sized iceoryx! Btw, if the analysis is still ongoing, might be a good idea to compare with iceoryx2 too: https://github.com/eclipse-iceoryx/iceoryx2 as it seems to have even lesser latency. |
Beta Was this translation helpful? Give feedback.
-
|
@xmfcx with the v0.5 release, iceoryx2 supports fully dynamic arrays. You just need to specify the number of elements and if there is enough free memory available, iceoryx2 will give you such an array without you having to do anything :) If you want to know more, just start a new discussion here or at eclipse-iceoryx/iceoryx2. I don't want to hijack this discussion thread :) |
Beta Was this translation helpful? Give feedback.
-
|
Notes from a separate call among @xmfcx, @sykwer, and @mitsudome-r
Discussion Points:
|


Beta Was this translation helpful? Give feedback.
-
|
After today's discussion, I'm personally fine with introducing agnocast into Autoware. However, I want to keep the feature turned off by default until it supports "ROS 2 publisher" -> "Agnocast Subscriber" communication (especially if we plan to apply this across various nodes). This is because we never know how users use Autoware, and we don't want users to get stuck with not being able to understand why it cannot send their topics to a specific Autoware nodes. I would like to make sure that people turn on the feature consciously with understanding of the current limitations. |
Beta Was this translation helpful? Give feedback.
-
|
https://github.com/orgs/autowarefoundation/discussions/5861 The slides used in the Software Working Group (3/11). |
Beta Was this translation helpful? Give feedback.
-
|
Hi @sykwer iceoryx dev here :) First, congratulations to Agnocast :) It's always interesting to see the different unique approaches taken to shared memory communication. I skimmed over the documentation, however have a few questions and I hope it’s alright if I ask them:
Currently, we are developing iceoryx2 at ekxide. Similar to you, we also know too well of the limitations of iceoryx classic and we try to tackle all of them with iceoryx2. For example, inceoryx2 does not require a central daemon and since the v0.5 release from last December, we fully support dynamic arrays. We do not yet support fully dynamic types like We are currently also working on a rmw_iceoryx2 and the next release is in the works. With that release, we will support unbounded messages via serialization. The overhead of serialization is noticeable however our latest numbers are below 0.4ms for 1MB. I guess you are using it via CycloneDDS, right? It would be great to exchange ideas in the interest of pursuing the best solutions. Btw, if you like, we could also help you to add iceoryx2 to your benchmark. Oh, and we can also just move this discussion to your repo or to eclipse-iceoryx. |
{kind=link}
Beta Was this translation helpful? Give feedback.
-
|
Thanks for your questions!
We support true zero-copy transfer (eliminating serialization/deserialization) for all ROS 2 message types, including fully dynamic types like
The current implementation assumes that the virtual address space at 0x40000000000 is conventionally available. However, we plan to support dynamically determining this range in the near future.
No, only the subscriber process can read a specific heap region of the publisher process in a read-only manner.
We have no immediate plans to support other OSes, but we would like to determine development priorities through discussions with the OSS community.
We have no immediate plans for certification, but we have not made a decision for the long term.
We are not entirely sure of the intent behind your question, but our system allows configuring QoS similar to ROS 2's QoS settings. |
Beta Was this translation helpful? Give feedback.
-
@elBoberido
We'd like to eliminate both serialization and deserialization in IPC while achieving true zero-copy communication without any modifications to ROS 2 message objects.
Thanks! We will add iceoryx2 for our benchmark. |
Beta Was this translation helpful? Give feedback.
-
|
Notably, the DDS discovery protocol has become a bottleneck, so we also have a long-term goal of moving away from the DDS-based communication stack. |
Beta Was this translation helpful? Give feedback.
-
Cool
Also cool
This is something I would like to know more about. But it has to wait until I'm less busy with other tasks.
This might be an option for collaboration. We already have a platform abstraction for multiple OSes. But I'm not sure how much it would fit your design since you also need a kernel module.
What we've learned is that one has to think about this early on, since it influences the API design and when it's done late, it limits the solution space.
Yeah, it's related to the QoS. I guess I need to check that. It's basically if a slow subscriber is able to receive, e.g. the latest three samples, even if the subscriber is much slower than the publisher.
I thinks it goes into a similar direction than what you will do with dynamically determining the address range. But we approach the problem from the opposite end since we are aiming for ASIL-D from the beginning. It might be possible to still be able to use ROS 2 std_msgs but that would be limited to QM software. I think for the safety critical subset the stl types like
Like mentioned above. For QM software this would be fine but at least for ASIL-D this would not work. But one can use these types https://github.com/ZhenshengLee/ros2_shm_msgs.
Cool. Thanks.
Yeah, the DDS discovery is one of the two big pain points we hear when people complain about DDS. The other one is the complex setup. So moving away from DDS will most probably make your users happy. |
Beta Was this translation helpful? Give feedback.
-
|
A conference paper on Agnocast has been accepted to ISORC 2025 and will be published in May. |
Beta Was this translation helpful? Give feedback.
-
|
@mitsudome-r Currently, I'm working on applying Agnocast to the following two large topics in autoware.universe:
However, I found that some related functions and subscribers have been move to autoware.core recently. So the questions is: "Is it possible to introduce Agnocast dependency into autoware.core?". |
Beta Was this translation helpful? Give feedback.
-
|
I might want to see them working on Universe first. |
Beta Was this translation helpful? Give feedback.
-
|
Thank you for your quick response.
It really makes sense, and I basically agree to this idea.
|
Beta Was this translation helpful? Give feedback.
-
The nodes from pointcloud_preprocessor was reimplemented in Core and the original code remains in Universe, we can apply agnocast to the one in universe first. |
Beta Was this translation helpful? Give feedback.
-
If it's okay with you, let's start with |
Beta Was this translation helpful? Give feedback.
-
Agreed. Thank you for your advice 👍 |
Beta Was this translation helpful? Give feedback.
-
|
Agnocast Adoption Tracker |
Beta Was this translation helpful? Give feedback.
-
|
Academic Paper Tracker
|
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
Uh oh!
There was an error while loading. Please reload this page.
-
TL;DR;
Agnocast repo: https://github.com/tier4/agnocast
Autoware mitigates the overhead of Pub/Sub communication between nodes by using
ComponentContainerto host multiple nodes within the same process.However, not all nodes can currently be consolidated into a single process, leading to significant inter-process communication (IPC) costs, especially when transferring large messages such asPointCloud2.From a fault isolation perspective, it is preferable to place each node in a separate process, making the long-term goal to phase out the use of
ComponentContainer.To achieve a one-node-per-process architecture while minimizing IPC overhead, zero-copy communication between processes is essential.Existing zero-copy middleware solutions include IceOryx (https://iceoryx.io/), which can be integrated seamlessly when using CycloneDDS without requiring changes to the technology stack (https://github.com/ros2/rmw_cyclonedds/blob/rolling/shared_memory_support.md). However, IceOryx only supports zero-copy communication for message types with static size. Since Autoware extensively relies on unsized sized message types (e.g., messages containing
std::vectorfields), integrating IceOryx poses significant challenges.A zero-copy middleware suitable for Autoware must satisfy all of the following requirements:
While IceOryx meets all requirements except the first, no existing middleware—either in production or in research—fully satisfies all these criteria. Some prior research has explored solutions addressing the first requirement, but no middleware has yet achieved comprehensive compliance with all four requirements, even at the research level.
To address these challenges, TIER IV has developed Agnocast (https://github.com/tier4/agnocast), a zero-copy middleware that fully satisfies all four requirements. Agnocast supports "True Zero-Copy Communication" by eliminating both serialization and deserialization, ensuring optimal efficiency. In this discussion, we will introduce the integration of Agnocast into Autoware and explore any overlooked concerns that may need further consideration.
Agnocast Software Stack
Agnocast consists of three main components:
As illustrated in the diagram, Agnocast operates independently of the ROS 2 software stack (rclcpp ~ rmw middleware). This independence allows it to function agnostically alongside any rmw middleware (e.g., any DDS), regardless of the specific implementation chosen. agnocast_heaphook is a dynamically injected library, inserted via LD_PRELOAD, that hooks heap-related functions such as malloc and free. agnocast_kmod serves as the central manager for Agnocast’s key data structures and is accessed via system calls from agnocastlib.
Required Modifications to Integrate Agnocast into Autoware
To apply Agnocast to Autoware, the following changes and operations are necessary:
LD_PRELOADand applying the Agnocast-specific executor.apt install ros-humble-agnocast)insmod /path/to/agnocast.ko)Agnocast provides a smart pointer called
agnocast::ipc_shared_ptr, which manages the lifetime of message objects transferred between processes. The only required change for publisher and subscription functions is to update their namespace fromrclcpptoagnocast.In the launch file, environment variables such as
LD_PRELOADmust be set to applyagnocast_heaphookto processes participating in Agnocast communication. Additionally, for ComposableNode, the Agnocast-specific executor must be applied within the launch file.When the publisher and subscription are rewritten using Agnocast's API, the corresponding communication edge achieves True Zero-Copy—regardless of whether the nodes are in the same process or different processes. For all other communication edges, whether on the same host or across different hosts, the existing ROS 2 communication stack (e.g., DDS) remains operational.This means that communication edges can be incrementally transitioned to True Zero-Copy, starting with the most performance-critical bottlenecks. Currently, "ROS 2 Publish → Agnocast Subscription" is not supported, but it may be supported in the future.
The dependency packages will be released so that they can be installed using commands such as
apt install ros-humble-agnocast(WIP: ros2-gbp/ros2-gbp-github-org#712, ros/rosdistro#44641).agnocast_heaphookandagnocast_kmodwill be released via a PPA and will be installed automatically along withagnocastlib. Foragnocast_kmod, it should either be explicitly inserted using theinsmodcommand or configured to be automatically inserted when the Linux system starts.Eliminate Side Effects of Agnocast Integration
As explained in the previous section, the modifications required to integrate Agnocast into Autoware are minimal. However, to further facilitate the initial integration, Agnocast will be integrated so that Autoware can be built without any dependency on Agnocast by default. In other words, it will be possible to build Autoware without installing
ros-humble-agnocast. When using the existing build commands, the generated build artifacts will remain unchanged. This is achieved by introducing macros, as shown in the example code.When the environment variable
ENABLE_AGNOCASTis set, these macros will expand to Agnocast's API and be used during the build process.The environment variable enforcement can be overridden using CMake options.
Additionally, the followings are considered:
Deployment Experiments and Evaluation Results at TIER IV
TIER IV conducted deployment experiments and performance evaluations of Agnocast in the following environments. In all cases, Agnocast was confirmed to function correctly:
This section shares the results of applying Agnocast to Autoware Universe v0.41.2. The applied code can be found in the following branch: https://github.com/veqcc/autoware/tree/test/agnocast
To target communication bottlenecks, the following topics were selected for Agnocast integration:
/sensing/lidar/*/pointcloud_before_sync/perception/obstacle_segmentation/pointcloudSince rviz subscribes to
⚠️ Note: The rosbag replay speed is x0.2, meaning that the measurements reflect a 1/5 scale of actual traffic.
/perception/obstacle_segmentation/pointcloud, communication with rviz continued using the existing DDS transport. The following results show the reduction in lo network traffic when applying Agnocast only to the/sensing/lidar/*/pointcloud_before_synctopic. (Applying Agnocast to/perception/obstacle_segmentation/pointclouddid not contribute to traffic reduction due to rviz's presence.). Left: before Agnocast applied, Right: after Agnocast applied.Applying Agnocast to the
/sensing/lidar/*/pointcloud_before_synctopic alone reduces lo traffic by 2/3. As Agnocast is applied to more topics, lo traffic will approach zero.Next, to verify that communication latency is nearly zero on edges where Agnocast is applied, we examine the latency measurements for the
/perception/obstacle_segmentation/pointcloudtopic.Next, we examine the improvement in Top LiDAR Preprocessing response time due to the zero communication latency of
/sensing/lidar/top/pointcloud_before_sync. Left: before Agnocast applied, Right: after Agnocast applied.The response time has improved by an average of approximately 4ms. As seen in the Response Time Details, this improvement is attributed to the near-zero communication latency of
/sensing/lidar/top/pointcloud_before_syncafter applying Agnocast.Applying Agnocast to topics that transfer large messages significantly reduced overall system memory consumption. Additionally, in processes where Agnocast was applied, DDS-related CPU usage was observed to decrease.
While this effect is not noticeable when applying Agnocast to only a few topics, full system-wide adoption would make Autoware startup instant. Currently, Autoware takes a long time to launch due to the DDS Discovery Protocol, whose message complexity scales with the square of the number of participants and the first power of the number of edges. As Agnocast is applied to more topics, the number of edges decreases, gradually reducing startup time.
Conference Paper and Document
A paper on Agnocast is accepted to ISORC 2025 and will be published in May.
currently under review and will be shared here once published.Additionally, the documentation is being written and will be shared here upon completion.
The release for Agnocast installation via apt install is currently in progress.
Beta Was this translation helpful? Give feedback.
All reactions