1. 核心作用
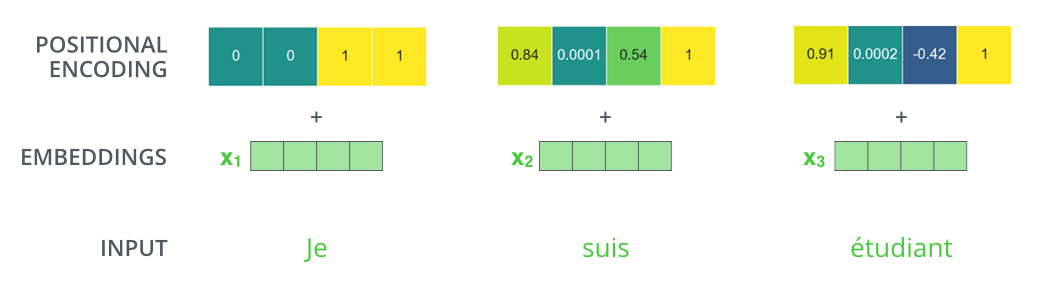
- 注入序列顺序信息:由于Transformer的自注意力机制本身不具备感知词序的能力,需通过位置编码为每个位置生成独特的标识。
- 处理变长序列:支持模型处理训练时未见过的序列长度(得益于正弦/余弦函数的周期性)。
对于位置
-
频率控制:不同维度对应不同的波长(高频→捕捉局部位置,低频→捕捉全局位置)
- 维度索引$i$越大,分母指数$\frac{2i}{d_{\text{model}}}$越大 → 频率越低
- 奇偶交替:偶数维度用正弦,奇数维度用余弦(确保相邻维度相关性)
假设
- 当
$i=0$ 时,波长:$10000^{0/512}=1$ → 周期为$2\pi$ - 当
$i=255$ 时,波长:$10000^{510/512}≈10000^{0.996}≈9540$ → 周期极长
import torch
import torch.nn as nn
import math
class PositionalEncoding(nn.Module):
def __init__(self, d_model, max_len=5000):
super().__init__()
# 生成位置编码矩阵 [max_len, d_model]
pe = torch.zeros(max_len, d_model)
position = torch.arange(0, max_len, dtype=torch.float).unsqueeze(1) # [max_len, 1]
# 计算div_term:10000^(2i/d_model)的倒数(对数空间计算避免溢出)
div_term = torch.exp(
torch.arange(0, d_model, 2).float() *
(-math.log(10000.0) / d_model
) # [d_model/2]
# 填充偶数和奇数维度
pe[:, 0::2] = torch.sin(position * div_term) # 偶数维度:sin(pos/10000^(2i/d))
pe[:, 1::2] = torch.cos(position * div_term) # 奇数维度:cos(pos/10000^(2i/d))
# 注册为缓冲区(不参与训练)
self.register_buffer('pe', pe.unsqueeze(0)) # [1, max_len, d_model]
def forward(self, x):
"""
x: 输入张量 [batch_size, seq_len, d_model]
返回: [batch_size, seq_len, d_model]
"""
return x + self.pe[:, :x.size(1)] # 自动广播相加| 公式步骤 | 代码实现 |
|---|---|
| 初始化位置矩阵 |
pe = torch.zeros(max_len, d_model) |
| 计算位置序列 |
position = torch.arange(0, max_len).unsqueeze(1) |
| 计算频率项 |
div_term = torch.exp(...) (对数变换避免数值溢出) |
| 填充正弦项(偶数维度) | pe[:, 0::2] = torch.sin(position * div_term) |
| 填充余弦项(奇数维度) | pe[:, 1::2] = torch.cos(position * div_term) |
| 与输入相加 | return x + self.pe[:, :x.size(1)] |
通过三角函数加法公式可推导相对位置关系:
其中
- 纵轴:位置(0~50)
- 横轴:维度(0~511)
- 颜色:编码值(-1~1)
| 特性 | 说明 |
|---|---|
| 可扩展性 | 能处理比训练时更长的序列(如训练时max_len=5000,推理时处理6000长度) |
| 确定性生成 | 无需学习参数,节省模型容量 |
| 各向异性编码 | 不同维度对应不同频率,编码空间更丰富 |
| 平移不变性 | 相邻位置的编码变化平滑,利于模型捕捉局部关系 |
# 参数设置
d_model = 512
max_len = 50
batch_size = 2
seq_len = 20
# 实例化模块
pe = PositionalEncoding(d_model)
# 模拟输入词向量
x = torch.randn(batch_size, seq_len, d_model)
# 添加位置编码
x_pe = pe(x) # [2, 20, 512]
# 检查编码值
print(x_pe[0, 0, :4])
# 示例输出:tensor([ 0.8415, 0.5403, -0.0042, 0.9999, ...])| 类型 | 方法 | 特点 |
|---|---|---|
| 学习式位置编码 | BERT、GPT | 通过可训练参数学习位置嵌入,灵活性高但无法外推 |
| 相对位置编码 | Transformer-XL | 编码相对位置距离而非绝对位置,提升长文本处理能力 |
| 旋转位置编码 | RoFormer | 通过复数空间旋转操作编码位置,理论性质更优 |
| 混合编码 | T5 | 前128维用学习式编码,后384维用固定式编码 |
Q1: 为什么不用简单的位置序号(如0,1,2,…)直接输入模型?
- 答案:整数值缺乏可学习的语义信息,且会导致数值范围差异过大(如长序列中位置号远大于词向量值)。
Q2: 位置编码是否需要参与反向传播训练?
- 原论文方案:固定不可训练(如代码中的
register_buffer)。 - 变体方案:可设置为可训练参数(如BERT)。
Q3: 如何处理超过max_len的序列?
- 截断法:取最后max_len个位置
- 外推法:按公式计算新位置编码(仅适用于正弦编码)