{kind=link}
{kind=link}
{kind=link}
An H-Bridge circuit for controlling a single robot motor.
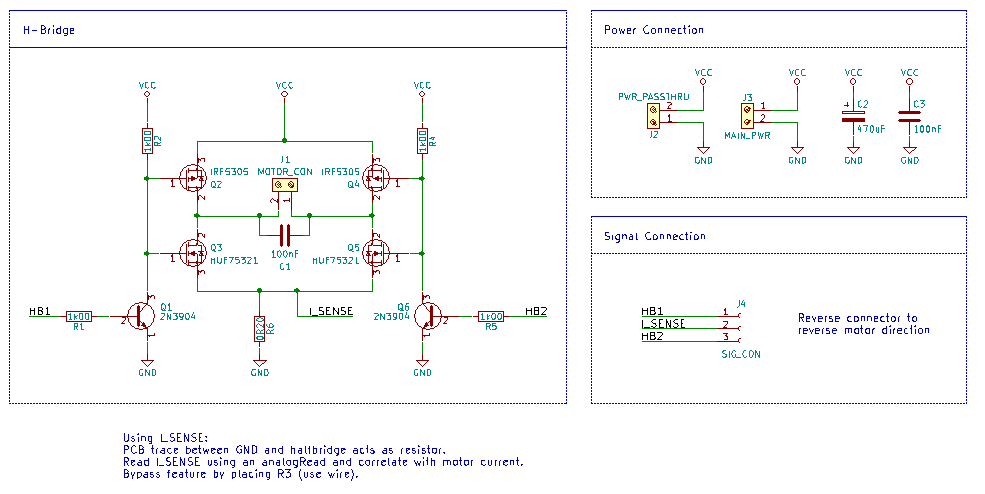
- 5V - 17V motor voltage range
- To be used with <1000Hz switching freqnuency (500Hz is preferred)
- Supports 3.3v and 5.0v logic level inputs
- Capable of driving up to 3A
- Requires only one PWM pin for speed, one digial I/O for direction
- Can be used as a half-bridge if direction pin is disconnected
- Has space for a current-sensing resistor (R6)
- Cannot be used to coast the motor
This project was created using KiCad 5 RC2. Use it to open and edit this design.
| "Id" | "Designator" | "Package" | "Quantity" | "Designation" | "Supplier and ref" | ||
|---|---|---|---|---|---|---|---|
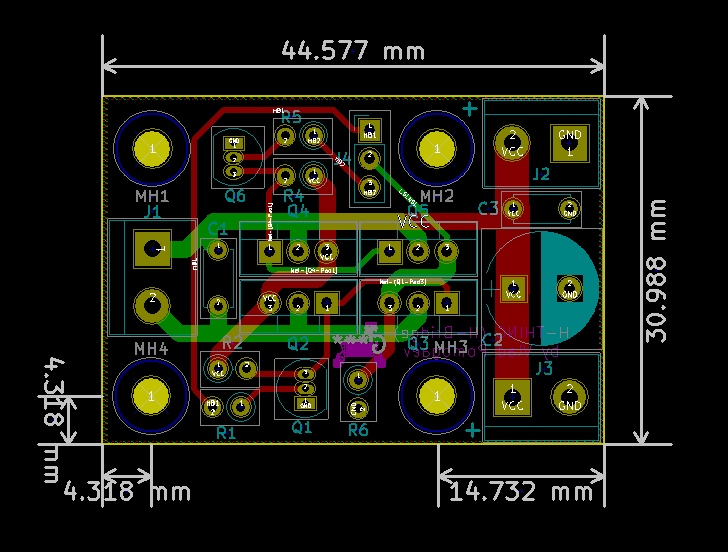
| 1 | "MH3,MH2,MH4,MH1" | "MountingHole_3.2mm_M3" | 4 | "MountingHole_3.2mm_M3" | |||
| 2 | "C1,C3" | "C_Disc_D5.0mm_W2.5mm_P5.00mm" | 2 | "100nF" | |||
| 3 | "C2" | "CP_Radial_D10.0mm_P5.00mm" | 1 | "470uF" | |||
| 4 | "J1" | "TerminalBlock_bornier-2_P5.08mm" | 1 | "MOTOR_CON" | |||
| 5 | "J2" | "TerminalBlock_bornier-2_P5.08mm" | 1 | "PWR_PASSTHRU" | |||
| 6 | "J3" | "TerminalBlock_bornier-2_P5.08mm" | 1 | "MAIN_PWR" | |||
| 7 | "Q1,Q6" | "TO-92_Inline_Narrow_Oval" | 2 | "2N3904" | |||
| 8 | "R1,R2,R4,R5" | "R_Axial_DIN0207_L6.3mm_D2.5mm_P2.54mm_Vertical" | 4 | "1k00" | |||
| 9 | "J4" | "Socket_Strip_Straight_1x03_Pitch2.54mm" | 1 | "SIG_CON" | |||
| 10 | "Q2,Q4" | "TO-220-3_Vertical" | 2 | "IRF5305" | |||
| 11 | "Q3,Q5" | "TO-220-3_Vertical" | 2 | "HUF75321" | |||
| 12 | "R6" | "R_Axial_DIN0207_L6.3mm_D2.5mm_P2.54mm_Vertical" | 1 | "0R20" | |||
| 13 | "G***" | "rover" | 1 | "LOGO" |
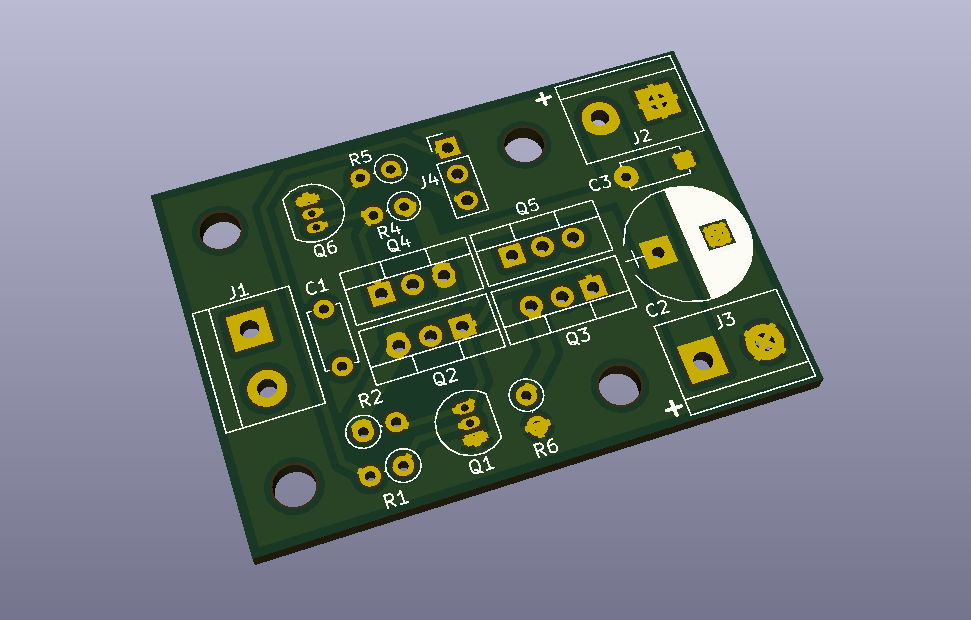
Install the H-THING using standoffs on the robot. Apply motor power (5-17V) to the screw terminals on the right hand side. Make sure the polarity is correct! The other screw terminal is for power pass-trough. Use the passthrough to chain more H-THINGs together. Finally, connect the motor to the last screw terminal (the one with the motor label).
Connect the H-THING to a microcontroller by connecting one of the outermost pins to a PWM pin, and the other to a digital I/O (non PWM).
Use the library included with this repo to control the speed and direction of the motor.
Use the following code to create a H-THING object:
#define SPEED_PIN 9
#define DIR_PIN 3
HTHING leftm = HTHING(PA3,PA2);
To control the motor:
left_motor.stop(); //stops the motor
left_motor.run(-255); //runs the motor backwards
left_motor.run(120); //runs the motor forwards
This project is licensed under the MIT License - see the LICENSE.md file for details
- Special thanks to the V2FC robot team!