All GPIO & function small size PX4 for UAV research for HKUST UAV-Group
ArduPilot and PX4 firmware are supported !
Dimension of Nxt-FC: 27mmx32mmx8mm
Micoair is now producing Nxt-FC: Micoair official website Taobao Ali-Express
| UART | TTY | SerialName | Suggest Funcion |
|---|---|---|---|
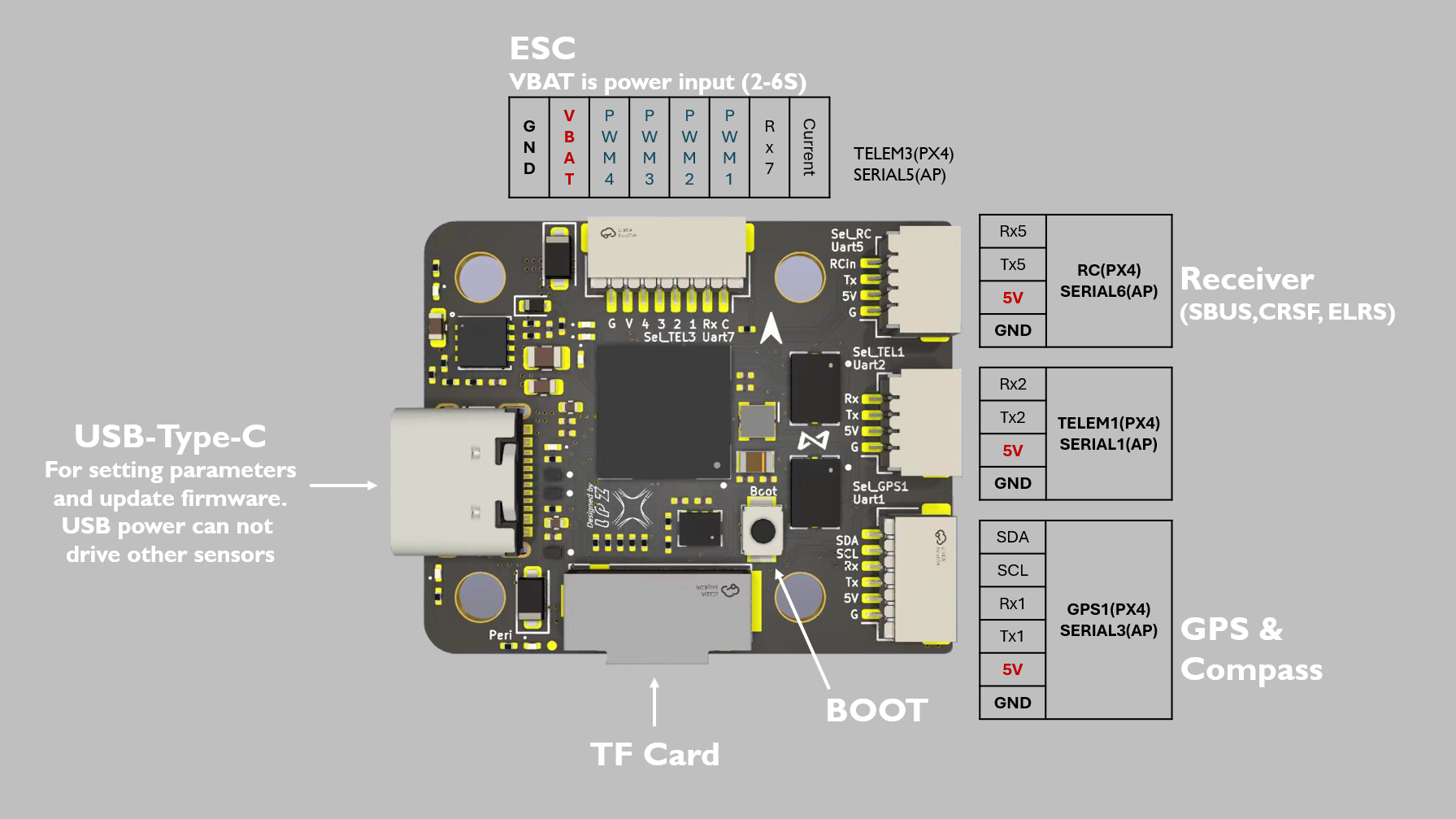
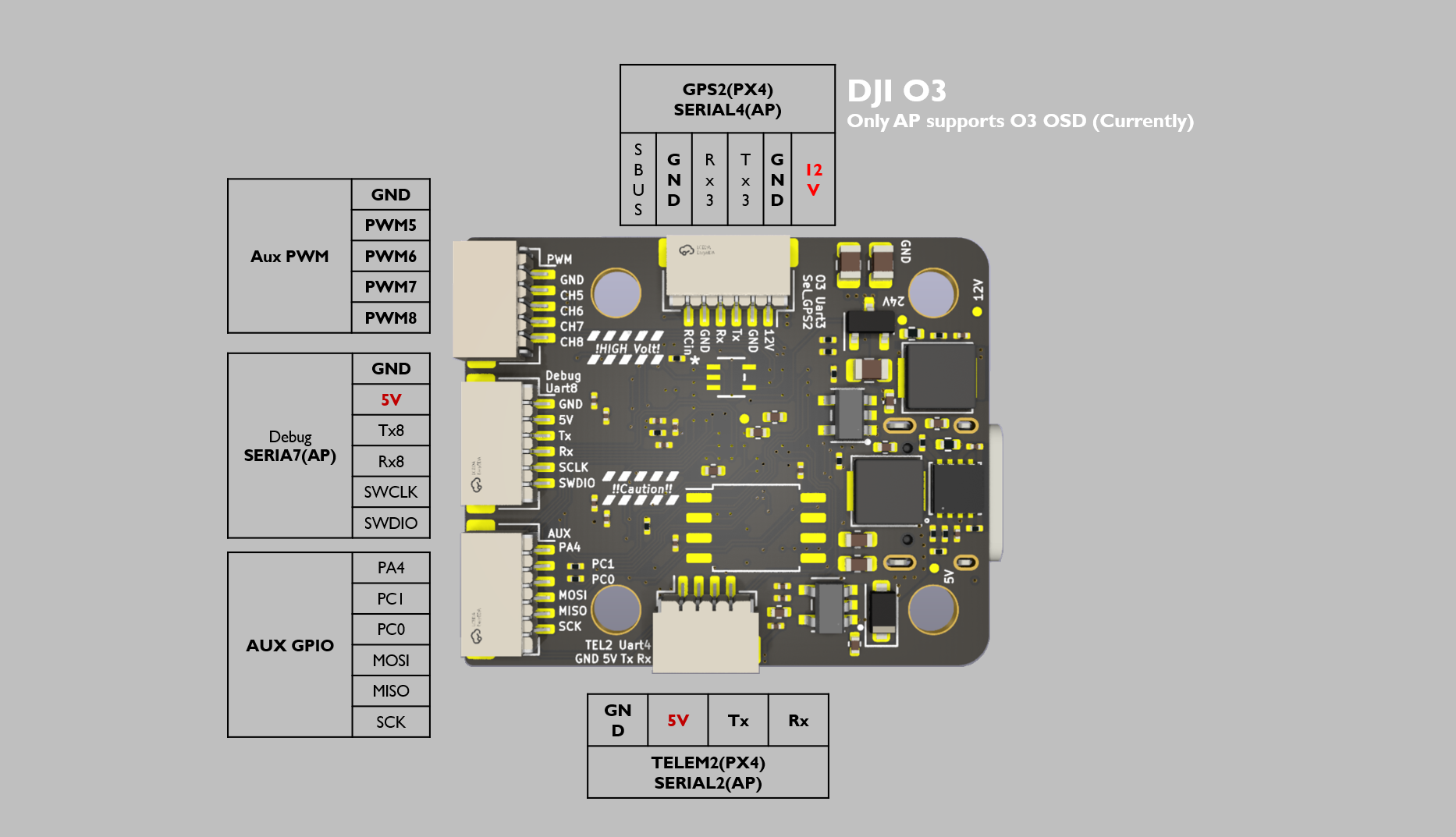
| USART1 | /dev/ttyS0 | SERIAL_GPS1 | |
| USART2 | /dev/ttyS1 | SERIAL_GPS2 | |
| USART3 | /dev/ttyS2 | SERIAL_TEL1 | |
| UART4 | /dev/ttyS3 | SERIAL_TEL2 | |
| UART5 | /dev/ttyS4 | SERIAL_RC | Receiver |
| USART6 | /dev/ttyS5 | Debug | Currently not available, can be enable |
| UART7 | /dev/ttyS6 | SERIAL_TEL3 | AUX |
| UART8 | /dev/ttyS7 | SERIAL_TEL4 | AUX |
-
Use the firmware files from ./firmware.
-
QGC upgrade is also available.
Follow the PX4 standard approach.
Bootloader:
make hkust_nxt-dual_bootloaderFirmware:
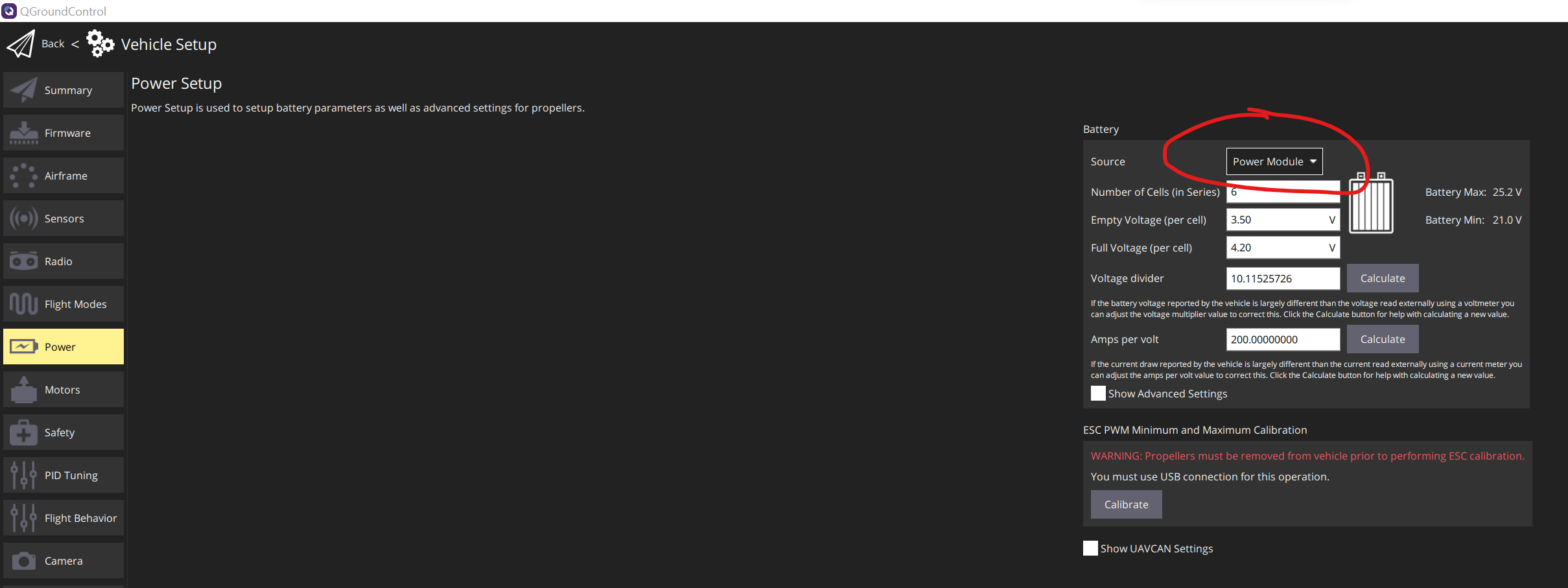
make hkust_nxt-dualSet power_source Power Module, then calibrate voltage and current analog data
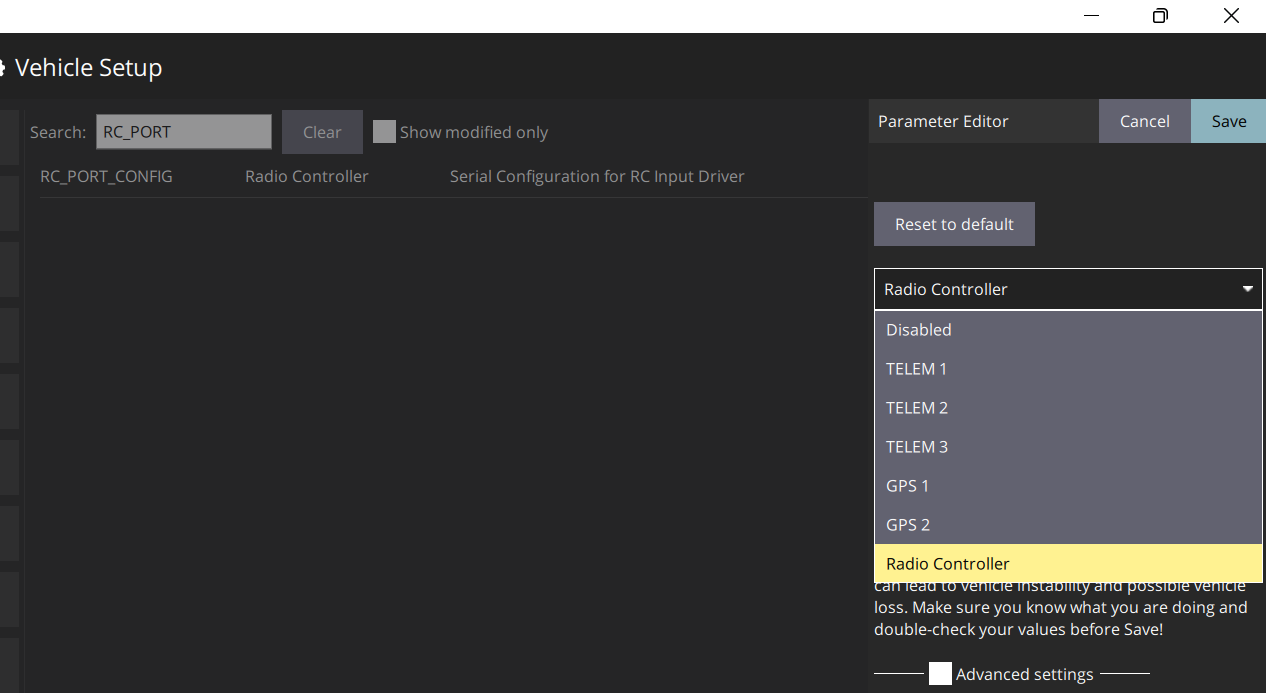
Set RC_PORT_CONFIG with Radio controller
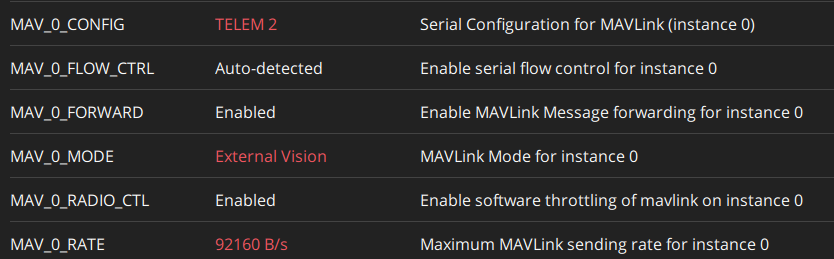
Set MAV_0_CONFIG with TELEM 2
create file in your tf-card /etc/extras.txt
mavlink stream -d /dev/ttyS3 -s ATTITUDE -r 200
mavlink stream -d /dev/ttyS3 -s HIGHRES_IMU -r 1000then using the following settings
IMU_GYRO_RATEMAX: 2000Hz
IMU_INTEG_RATE: 400Hz
MAV_0_MODE: External vision
Set Uart4 to 921600
MAV_0_RATE 92160B/s
after these settings you will have 250Hz /imu/data_raw /imu/data
- 500Hz stable firmware based on PX4 1.14