Peize Liu, Chen Feng†, Yang Xu, Yan Ning, Hao Xu†, and Shaojie Shen
HKUST Aerial Robotics Group
†Corresponding Authors

- [30/06/2024]: OmniNxt is accepted to IROS 2024.
- [15/08/2024] V0.1 Release
[TOC]
You should have basic knowledge of the standard quadrotor's electronic system.
| 🧰Component | 📏 Specification | 🔗 Purchase Link |
|---|---|---|
| Quad-Fisheye Camera Set | ||
| OAK-FFC-4P | Camera control board | Official / Taobao |
| B0335 (OV9782) | Camera modules (Fisheye lens FOV larger than 210 degrees) | Official / Taobao |
| Camera cables | Customized | Camera cable SCH |
| Onboard computer | ||
| Jetson Orin Nx | ||
| Jetson Orin Nx carrier board | DM | |
| Jetson Orin Nx radiator | ||
| Jeston Orin Network card | ||
| 2230 SSD | ||
| Intel AX200 | ||
| Flight platforms (6S) | ||
| Nxt-FC | Project Page | MicoAir / Taobao |
| Flight frame | Customized | Fusion360 |
| Protector | Customized / Oddity RC XI35 protector | Fusion360 / Oddity RC |
| Motors | 2204 1750KV/ 1804 2450KV | |
| 6S Battery |
Our latest design can be accessed by Fusion360.🔗Link Access code: hkustUAV
ROS wrap driver 🔗oak_ffc_4p, which contains hardware information, ROS1 driver and test tools.
Calibration tool 🔗 quater-calib
Environment Info
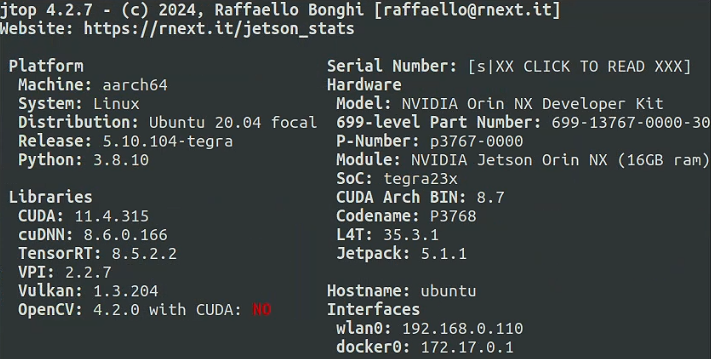
We suggest you follow these settings to avoid conflict (especially CUDA and TensorRT).
We open-source hardware designs at 🔗NXT-FC. Nxt-FC supports PX4 and Ardupilot firmware.
Follow the instructions for setting up the Nxt-FC part to configure your flight controller.
The PX4 parameter of OmniNxt can be downloaded from Onedrive.
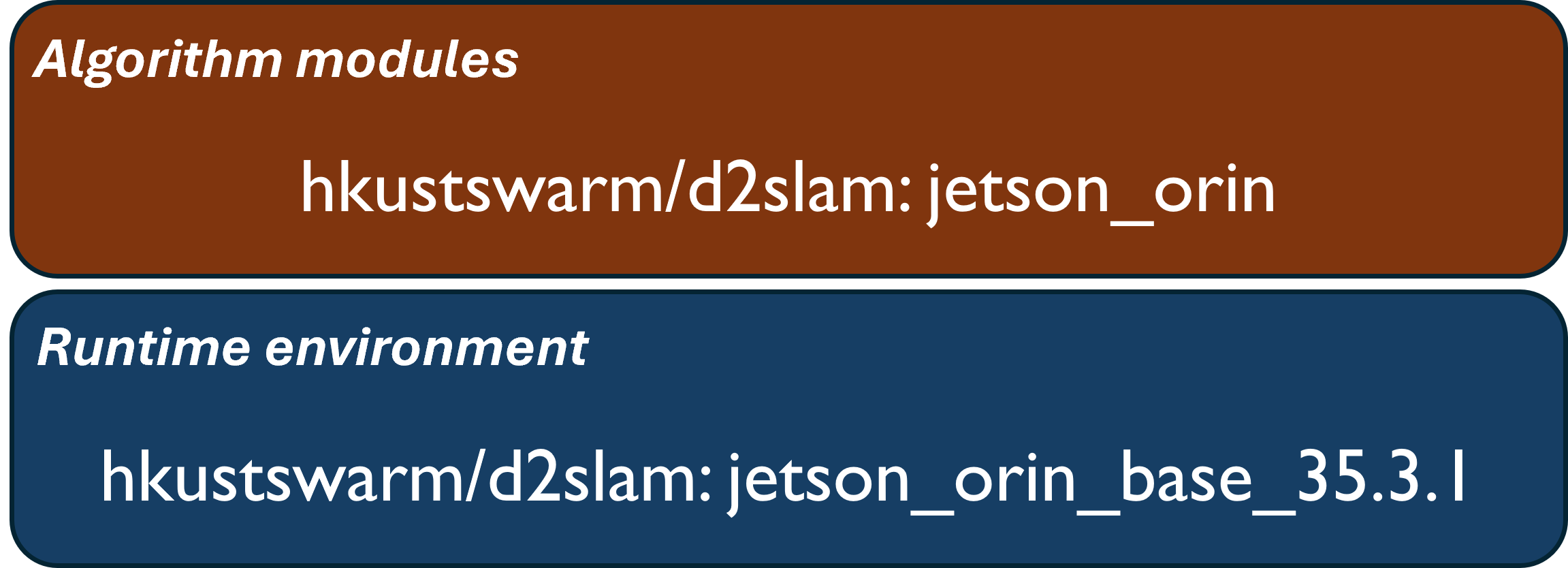
Our Omni-VINS and Omni-Depth are developed from D2SLAM. Since building the Docker images on the local machine(Jetson Orin) usually takes a long time, we suggest you pull the images from the Docker Hub. If you want to build the Docker image on your local machine, follow the instructions [Build Docker Images On Local Machine](#Build Docker images in local machines).
the docker images structure is as follows:
git clone --branch pr_fix_main https://github.com/HKUST-Aerial-Robotics/D2SLAM.gitcd ./D2SLAM/config/quadcam_drone_nxt_tmpIf you have already calibrated your quad fisheye camera set, you can simply replace the files with the same name, which includes:
- stereo_calib_n_m_240_320.yaml (n and m is the camera number; used in Omni-Depth).
- fisheye_cams.yaml. (used in Omni-VINS)
./start_docker.sh is under the ./D2SLAM directory.
Modify the following parameters with the absolute path under your local host environment.
- DATA_SET (where the data set is) (Optional)
Then run with the following command under the D2SLAM directory (very important, this will map your D2SLAM dir into the container):
./start_docker.sh 1run all algorithm modules together (Omni-VINS & Omni-Depth)
## you should under /root/swarm_ws/
source ./devel/setup.bash
roslaunch d2vins quadcam.laucnhOnly launch Omni-VINS. Please remove the nodes in the red box
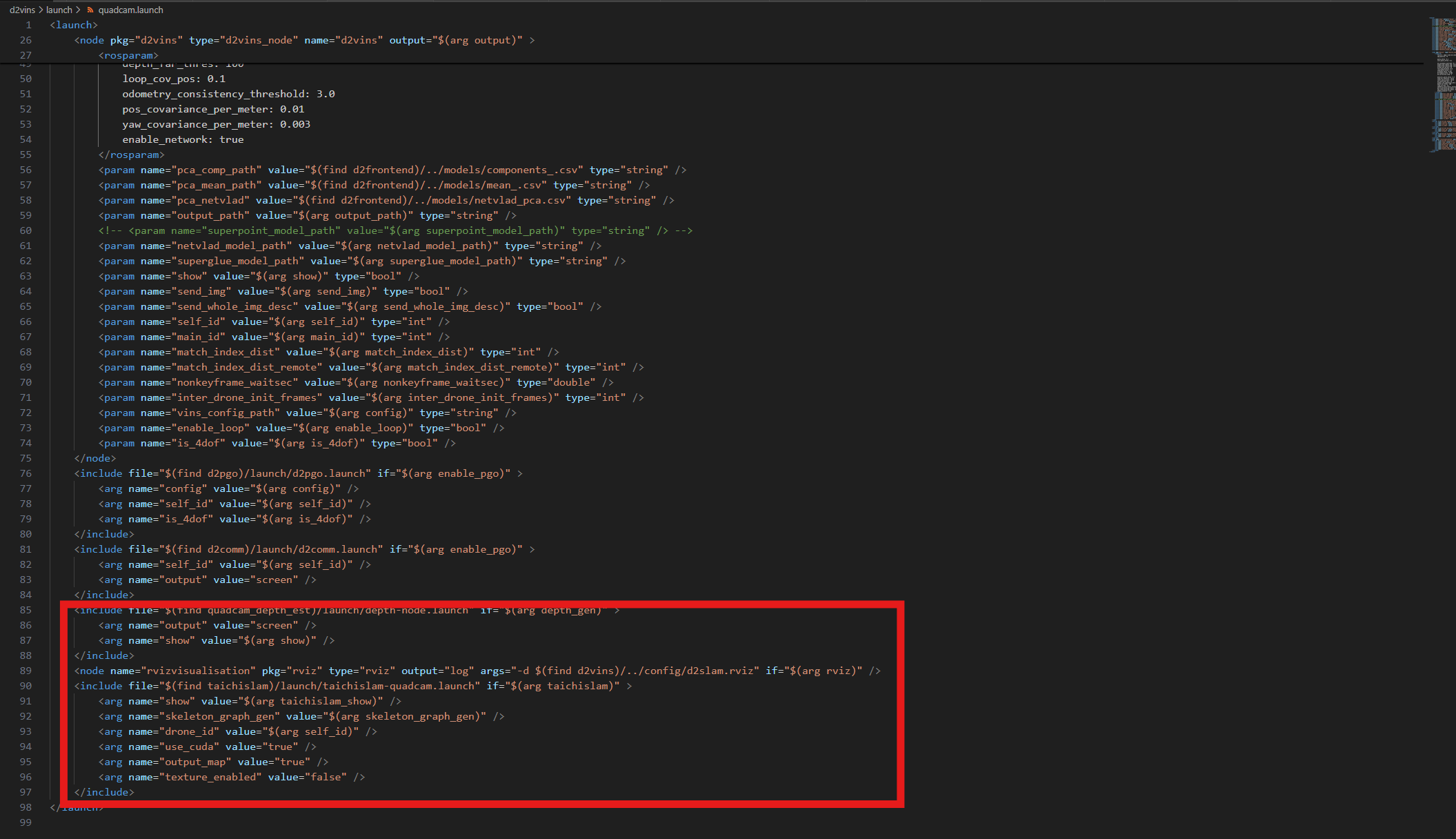
source ./devel/setup.bash
roslaunch d2vins quadcam.laucnhOnly launch Omni-Depth
source ./devel/setup.bash
roslaunch quadcam_depth_est depth-node.launch[Notice] If you are running Omni-VINS and Omni-Depth for the first time, the initialization process of these two modules would be a little bit long because of the building of the inference engine.
If everything works well, you will see
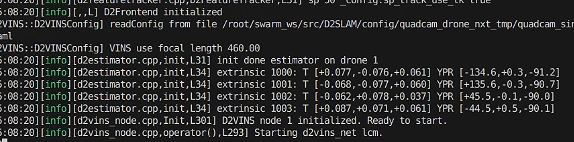
which means Omni-VINS(D2VINS) initialized normally.
Omni-Depth
cd /D2SLA/docker
make jetson_orin_basecd /D2SLA/docker
make jetson_orinWe highly suggest you refer to Fast-Lab's PX4 controller PX4-Control
We also provide our yaw-rotation-free version of Fast-Lab's PX4 controller PX4-Control.
Please cite ZJU-Fast-Lab if these modules are useful for your research and project.
We modified some of the strategies in the ego-planner. Our version is here ego-planner-omni-modify
Please cite ZJU-Fast-Lab's ego-planner if these modules are useful for your research and project.