roslaunch invpend_control load_invpend.launch
Operate rqt_reconfigure to modify PID values launch rqt_reconfigure with the following command
rosrun rqt_reconfigure rqt_reconfigure
Demo includes setting pole to horizontal and publishing velocity commands.
controllqr.py in /invpend_control/scripts/ is to be run to execute LQR control.
Check /inverted_pendulum_EOM_Lagrangian.pdf for derivation of Equations of motion using Lagrangian method and derivation of A, B, in the equation:
Xd = Ax + Bu
Goal is set to
[[1],[0],[0],[0]]
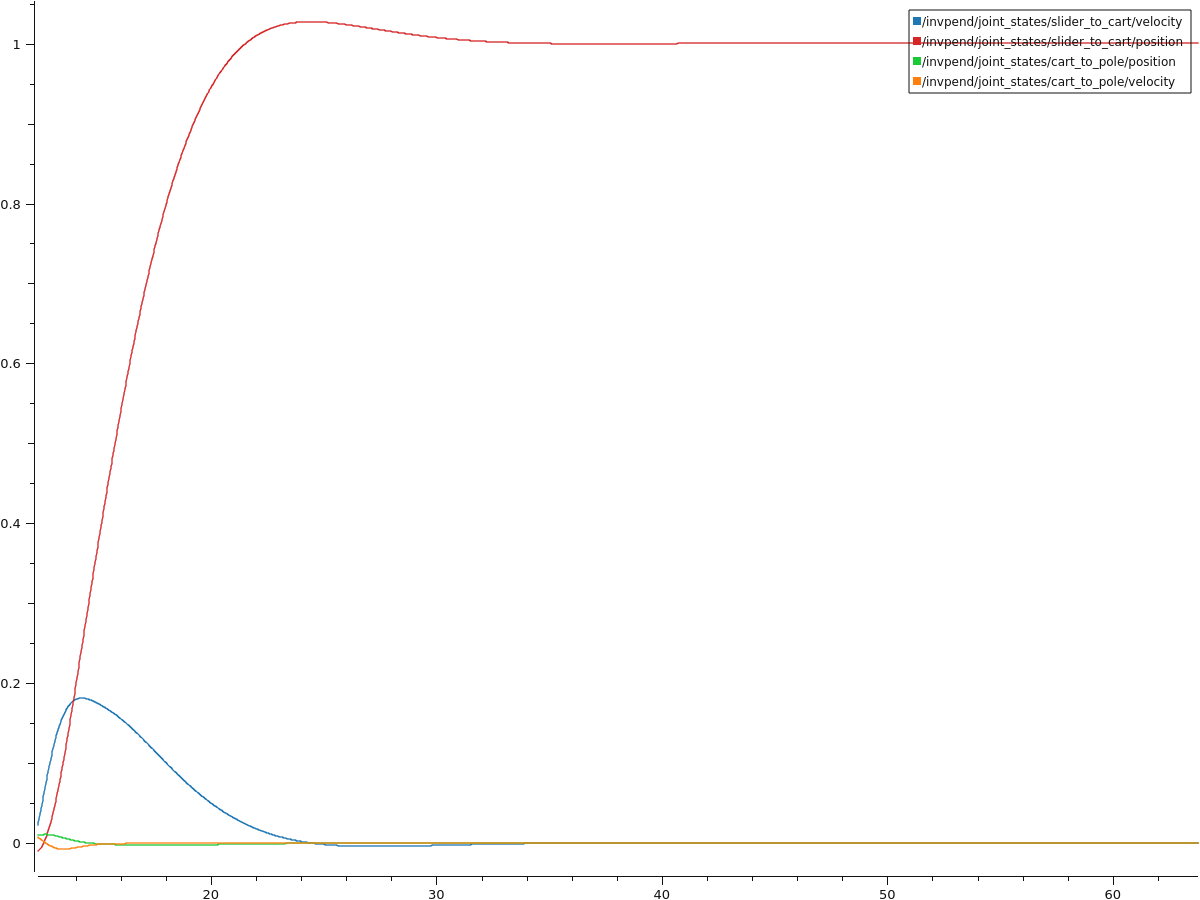
LQR controller converges on the set goal quite well.
Cost matrix choosen is
Q = np.diag([1, 1, 10, 100]);
The state cost matrix (Q) is chosen based on the sensitivity analysis of each state variable to keep the system in the linearized window. The input cost matrix (R) is chosen to prioritize low actuator effort for specific actuator states. However, for the inverted pendulum system, controllability is more critical than conserving actuator effort. Hence, a lower value is chosen for the R matrix to achieve better controllability.
R = np.diag([0.1])