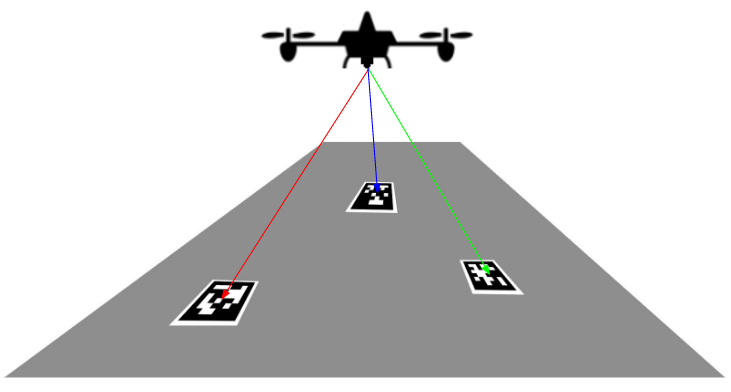
Indoor autonomous flight using a downward facing camera and multiple apriltags for localization, together with a ring of 8 range sensors for obstacle avoidance.
- MatrixVision Camera
- Odroid XU4
- Pixhawk Flight Controller with PX4 stack
- Teraranger Tower
- From http://odroid.in/ubuntu_14.04lts/ download ubuntu-14.04.1lts-lubuntu-odroid-xu3-20150212.img.xz image file to your computer. Flash this image onto the SD card
- Power up Odroid with the SD card, and resize your root partition using Odroid Utility and reboot
- Download the ros-setup.sh script from the setup folder
- In the download directory, execute chmod a+x ./ros-setup.sh to make the script file executable
- Execute ./ros-setup.sh to install ROS Indigo barebones. This may take a few minutes
- Download the AutonomousFlight.sh script from the setup folder
- In the download directory, execute chmod a+x ./AutonomousFlight.sh to make the script file executable
- Execute ./AutonomousFlight.sh to install all the required packages. This may take a few minutes