ESP-Drone is an ESP32/ESP32-S2/ESP32-S3 based flying development board provided by Espressif. ESP-Drone is equipped with Wi-Fi key features, which allows this drone to be connected to and controlled by an APP or a gamepad over a Wi-Fi network. This drone comes with simple-structured hardware, clear codes, and supports functional extension. Therefore, ESP-Drone can be used in STEAM education. Part of the codes is from Crazyflie open source project under GPL3.0 license.
 ESP-Drone
ESP-Drone

ESP-Drone - Um pequeno drone com ESP32
https://docs.espressif.com/projects/espressif-esp-drone/en/latest/gettingstarted.html

If you love the idea of building your own quadcopter but haven’t got a clue how and where to start, you are definitely on the right page. We know how difficult and frustrating the research can be, so we decided to make a tutorial for building your own quadcopter using an Arduino board. We hope that you will find it useful.
And, to get you even more excited about your upcoming project, here is an Arduino quadcopter in action:

https://www.mydronelab.com/blog/arduino-quadcopter.html
The YMFC-32 is a STM32 based quadcopter that is easy to build and fun to fly. The auto level functionality makes it also a very capable starting quadcopter. Auto leveling means that, when you release the sticks the quadcopter levelsit self.
The total cost to build the YMFC-32 is approximately $135.
Check step 2 below for a complete hardware list for all the individual parts. This includes a battery, transmitter, charger, resistors, etc.
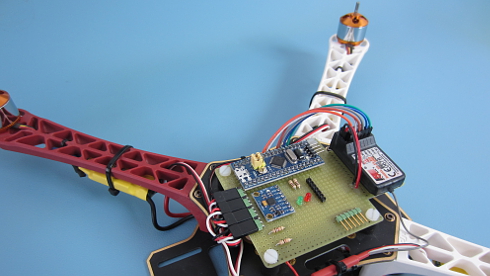
The YMFC-32 is not a high level flight controller. The purpose of the YMFC-32 is to provide a simple and understandable code that is needed to build a DIY quadcopter flight controller.
The code is well commented and clearly explained in the YMFC-32 video tutorials. This makes it possible to further develop the YMFC-32 flight controller code for your own purpose.
If you encounter any problems during the build or setup please check the Q&A page first. Most questions are already answered in detail.

ArduPilot is a trusted, versatile, and open source autopilot system supporting many vehicle types: multi-copters, traditional helicopters, fixed wing aircraft, boats, submarines, rovers and more. The source code is developed by a large community of professionals and enthusiasts. New developers are always welcome! The best way to start is by joining the Developer Team Forum, which is open to all and chock-full of daily development goodness.


Criamos plataformas abertas de software e hardware para robótica. Trabalhando com nossa comunidade global, oferecemos três plataformas abertas: ROS, Gazebo e Open-RMF. Programe seus robôs com ROS, simule-os com o Gazebo, interopere seus sistemas usando Open-RMF. Essas plataformas são amplamente utilizadas em todo o mundo, desde implantações de produção até projetos de sala de aula. Para saber mais sobre como a comunidade está usando essas plataformas para criar soluções valiosas, consulte a vitrine da nossa comunidade.

The Open Robotics Middleware Framework (Open-RMF) is a free, open source, modular software system that enables robotic system interoperability. Open-RMF coordinates multiple fleets of indoor and outdoor robots with typical robotic use cases and integrates them with elevators/lifts, doors and other infrastructure.


Gazebo accurately and efficiently simulates robots for your application, whether it's warehouse logistics, autonomous driving, or space exploration. You get a robust physics engine, high-quality graphics, and programmatic interfaces, including integration with ROS. And it's all open source

ROS is a software development kit that helps you build robot applications. From drivers to state-of-the-art algorithms, and with powerful developer tools, ROS has what you need for your next robotics project including integration with Gazebo. And it's all open source.


PX4 is an open source flight control software for drones and other unmanned vehicles. The project provides a flexible set of tools for drone developers to share technologies to create tailored solutions for drone applications. PX4 is hosted by Dronecode, a Linux Foundation non-profit.



A Raspberry Pi can be used to build a drone, acting as a companion computer to a flight controller, or even as the primary flight controller itself. This allows for advanced features and customization not typically available in commercially available drones.
/i.s3.glbimg.com/v1/AUTH_08fbf48bc0524877943fe86e43087e7a/internal_photos/bs/2021/q/0/6htoAeS5Gn6MW2G7k81A/2017-01-25-drone1.png)

https://dojofordrones.com/raspberry-pi-drone/
ArduPilot is the most advanced, full-featured, and reliable open source autopilot software available. It has been under development since 2010 by a diverse team of professional engineers, computer scientists, and community contributors. Our autopilot software is capable of controlling almost any vehicle system imaginable, from conventional airplanes, quad planes, multi-rotors, and helicopters to rovers, boats, balance bots, and even submarines. It is continually being expanded to provide support for new emerging vehicle types.

This page is a resource for the drone community supporting multi-rotor Drones based on Free and Open Source Software (FOSS).

The ubiquity of the electric multi-rotor drone was made possible by Arduino based flight software and Linux based ground station planning software. Some drone manufacturers like 3D Robotics and Yuneec have stayed true to the Open Source Software roots while the industry leader DJI is predominantly closed source and proprietary.
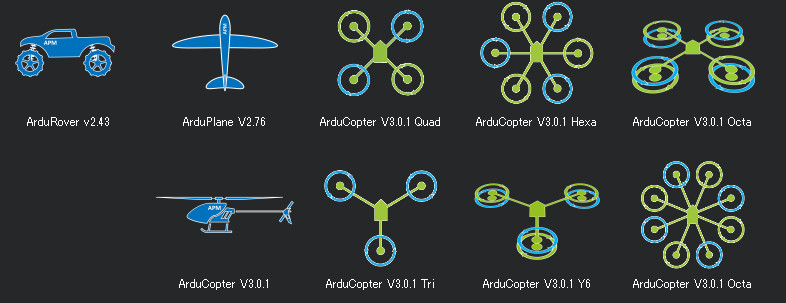
Multi-rotor Configurations:
- Tricopter: three motors/three arms
- Quadcopter: four motors/four arms
- Hexacopter: six motors/six arms
- Octacopter: eight motors/eight arms
- Y6: two motors on each of three arms
- X8: two motors on each of four arms

https://www.yolinux.com/TUTORIALS/Drones.html
This community is the birthplace of ArduPilot, the world's first universal autopilot platform (planes, multicopters of all sorts and ground rovers). Today the Pixhawk autopilot runs a variety of powerful free and open UAV software systems, including:
- PX4, a pro-quality open source copter, plane, rover and VTOL software stack from the Linux Foundation's Dronecode Project
- ArduCopter, open source multicopter and heli UAV software
- ArduPlane, open source software for planes of all types
- ArduRover, open source software for ground-based vehicles

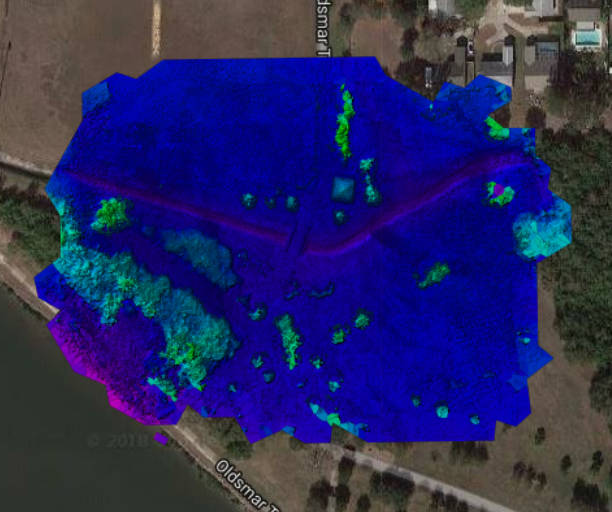
So you've used a drone to capture a bunch of overhead imagery of an area of interest. Now what? OpenDroneMap may be able to help. This software takes this aerial imagery and helps you process it into point clouds, digital surface and elevation models, or just orthorectify the imagery (in essence, line up the imagery to a known coordinate system for further analysis).
Grab the source or a beta release on under a GPLv3 license, as well as a sample data set, and see whether it's a good fit for you; the project's wiki has more information. OpenDroneMap is designed to be run in Linux and can be run with Docker to avoid needing the exact configuration environment the project was built for.
The Dronecode project is a Linux Foundation-sponsored project working to build a common open source platform for UAV development. It's been through a lot of changes in the last few years, but today it serves as the governance structure for the components of the overall platform, where the project's actual development occurs. Those components include the PX4 autopilot flight control system, the MAVLink robotics communication toolkit, and the QGroundControl user interface for flight control, mission planning, and configuration, all of which have individual GitHub repositories.


PX4 powers any vehicle from racing and cargo drones through to ground vehicles. The powerful and uniquely flexible core of the Dronecode Platform is open-source, and available for you to use and customise as needed.


https://dronecode.diyrobocars.com/
Check out what's new in open source drone hardware, software, and related projects.
Over the past few years, interest in civilian, military, and commercial drones has grown rapidly, which has also driven the maker community's interest in open source drone projects.
The list of unmanned aerial devices (UAVs) that fit the moniker of drone seems to be constantly expanding. These days, the term seems to encompass everything from what is essentially a cheap, multi-bladed toy helicopter, all the way up to custom-built soaring machines with incredibly adept artificial intelligence capabilities.
Most people are looking for something in the middle. They'd like a flying vehicle that is large enough to support a decently long flight time, hold a camera or other data capture device, and perhaps be able to control some (or all) of its flight autonomously using pre-programmed coordinates or real-time data.
The premade devices in this space vary greatly in both price and build quality, and most of the ones I've seen use proprietary software and hardware. But you don't have to go this route! The drone-building community has created many software and hardware projects under open licenses that allow you to build, repair, customize, and experiment with your own drone, or to supplement the use of drones in some other way. Let's take a look at some of those projects.
https://opensource.com/article/18/2/drone-projects

o ArduBee é um pequeno drone Open Source e modular baseado no software ArduPilot. Sendo capaz de voar em ambientes internos e externos e vem equipado com um poderoso microcontrolador ARM Cortex M7, o STM32H7.
O projeto tem foco em aplicações educacionais, pesquisa e público STEM. É uma plataforma expansível com um sistema complementar que permite adicionar seus próprios componentes personalizados.


https://www.unmannedsystemstechnology.com/company/cubepilot/ardubee/