In this repository, we include all code necessary for inference of a full 8-bit quantized DQN policy on a BitCraze CrazyFlie. Our methodology is summarized as:

This repository consists of the following three parts:
- Training: the settings required to train with the Air Learning platform.
- Conversion: the python code for conversion from a Tensorflow checkpoint (.cktp) to a piece of c++ code.
- crazyflie-firmware: the crazyflie firmware enabling inference.
Paper: https://arxiv.org/abs/1909.11236
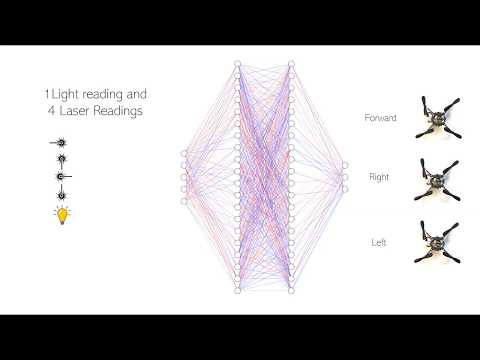
Title: Learning to Seek: Autonomous Source Seeking with Deep Reinforcement Learning Onboard a Nano Drone Microcontroller
Authors: Bardienus P. Duisterhof, Srivatsan Krishnan, Jonathan J. Cruz, Colby R. Banbury, William Fu, Aleksandra Faust, Guido C. H. E. de Croon, Vijay Janapa Reddi
Video:
The following instructions are tested on Ubuntu 18.04
Training
First of all, install the Air Learning platform according to the instructions on its github page. Verify your installation was successfull before proceeding.
Your installation will contain an airlearning-rl folder, which is the folder we need to change to train a source-seeking agent. Simply do a:
cd ~/airlearning-rl
git fetch --all
git checkout source-seekingThis will provide you with all the algorithmic changes we made to Air Learning.
Conversion
dependencies
pip3 install tensorflow matplotlib numpy Crazyflie-firmware
dependencies
sudo add-apt-repository ppa:team-gcc-arm-embedded/ppa
sudo apt-get update
sudo apt install gcc-arm-embeddedClone
git clone https://github.com/harvard-edge/source-seeking --recursive
cd crazyflie-firmware
git submodule init
git submodule updateTraining
Once the source seeking branch in airlearning-rl is checked out, you can proceed using airlearning in a normal fashion. Use the settings.py file to adjust the environment.
Conversion
Use main.py in the conversion folder to call the functions needed. For the current settings, the provided model will be converted in a total of 1,000 iterations. Settings can be altered in settings.py.
CrazyFlie Firmware
make clean
make -j4
make cloadNote: the crazyflie won't take-off without a light-sensor connected. We designed the code as such to verify sensor connectivity before commencing a run. If no sensor is present, alter this file, by commenting out all 'TS2591XXX' functions, and replace 'sensor_read' with something else (e.g., random values).
For help, contact Bart ([email protected])
Contributors
Bardienus Duisterhof ([email protected])
Srivatsan Krishnan ([email protected])
William Fu ([email protected])