





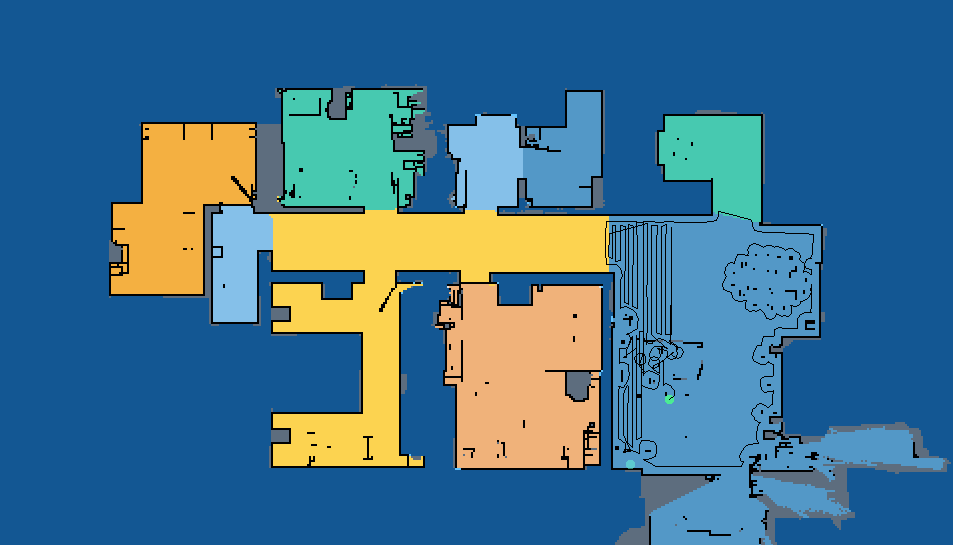
This custom integration provides a way to present a live view of a map for Xiaomi, Roborock, Viomi, Roidmi and Dreame vacuums. (Supported devices)

Using HACS (recommended)
This integration can be installed using HACS.
To do it search for Xiaomi Cloud Map Extractor in Integrations section.
To install this integration manually you have to download xiaomi_cloud_map_extractor.zip and extract its contents to config/custom_components/xiaomi_cloud_map_extractor directory:
mkdir -p custom_components/xiaomi_cloud_map_extractor
cd custom_components/xiaomi_cloud_map_extractor
wget https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/releases/latest/download/xiaomi_cloud_map_extractor.zip
unzip xiaomi_cloud_map_extractor.zip
rm xiaomi_cloud_map_extractor.zipAfter installation of the custom component, it needs to be configured in configuration.yaml file.
To do so, add a camera entry to your configuration with at least a basic or recommended configuration.
Vacuum token can be extracted by following this guide (ignore "not recommended" message, as it applies only to built-in Xiaomi Miio integration).
You also need to enter your Xiaomi Cloud username and password.
These are the credentials used for the Xiaomi Home app (not ones from Roborock app).
After installation and a reboot of your Home Assistant instance, you should get a camera entity which shows the vacuum map.
This might take a few minutes after a first restart.
If you have a problem with configuration validation you have to remove camera from configuration.yaml, restart Home Assistant, add camera config and restart HA again.
After modification of camera's configuration you can reload its settings in Configuration or using xiaomi_cloud_map_extractor.reload service.
camera:
- platform: xiaomi_cloud_map_extractor
host: !secret xiaomi_vacuum_host
token: !secret xiaomi_vacuum_token
username: !secret xiaomi_cloud_username
password: !secret xiaomi_cloud_passwordcamera:
- platform: xiaomi_cloud_map_extractor
host: !secret xiaomi_vacuum_host
token: !secret xiaomi_vacuum_token
username: !secret xiaomi_cloud_username
password: !secret xiaomi_cloud_password
draw: ['all']
attributes:
- calibration_points| This configuration's purpose is to show all available options, do not use it unless you know what you are doing. |
|---|
I know what I'm doing and I will not recklessly copy this config to my setup
camera:
- platform: xiaomi_cloud_map_extractor
host: !secret xiaomi_vacuum_host
token: !secret xiaomi_vacuum_token
username: !secret xiaomi_cloud_username
password: !secret xiaomi_cloud_password
country: "de"
name: "My Vacuum Camera"
colors:
color_map_inside: [32, 115, 185]
color_map_outside: [19, 87, 148]
color_map_wall: [100, 196, 254]
color_map_wall_v2: [93, 109, 126]
color_grey_wall: [93, 109, 126]
color_ignored_obstacle: [0, 0, 0, 127]
color_ignored_obstacle_with_photo: [0, 0, 0, 127]
color_obstacle: [0, 0, 0, 127]
color_obstacle_with_photo: [0, 0, 0, 127]
color_path: [147, 194, 238]
color_goto_path: [0, 255, 0]
color_predicted_path: [255, 255, 0, 0]
color_cleaned_area: [127, 127, 127, 127]
color_zones: [0xAD, 0xD8, 0xFF, 0x8F]
color_zones_outline: [0xAD, 0xD8, 0xFF]
color_virtual_walls: [255, 0, 0]
color_new_discovered_area: [64, 64, 64]
color_no_go_zones: [255, 33, 55, 127]
color_no_go_zones_outline: [255, 0, 0]
color_no_mop_zones: [163, 130, 211, 127]
color_no_mop_zones_outline: [163, 130, 211]
color_charger: [0x66, 0xfe, 0xda, 0x7f]
color_robo: [75, 235, 149]
color_room_names: [0, 0, 0]
color_unknown: [0, 0, 0]
color_scan: [0xDF, 0xDF, 0xDF]
room_colors:
1: [240, 178, 122]
2: [133, 193, 233]
3: [217, 136, 128]
4: [52, 152, 219]
5: [205, 97, 85]
6: [243, 156, 18]
7: [88, 214, 141]
8: [245, 176, 65]
9: [252, 212, 81]
10: [72, 201, 176]
11: [84, 153, 199]
12: [133, 193, 233]
13: [245, 176, 65]
14: [82, 190, 128]
15: [72, 201, 176]
16: [165, 105, 18]
draw:
- charger
- cleaned_area
- goto_path
- ignored_obstacles
- ignored_obstacles_with_photo
- no_go_zones
- no_mopping_zones
- obstacles
- obstacles_with_photo
- path
- predicted_path
- room_names
- vacuum_position
- virtual_walls
- zones
texts:
- text: "Room 1"
x: 25
y: 25
color: [125, 20, 213]
- text: "Room 2"
x: 25
y: 75
color: [125, 20, 213, 127]
font: "FreeSans.ttf"
font_size: 25
map_transformation:
scale: 2
rotate: 180
trim:
top: 10
bottom: 20
left: 30
right: 40
sizes:
charger_radius: 4
vacuum_radius: 6.5
path_width: 1
obstacle_radius: 3
ignored_obstacle_radius: 3
obstacle_with_photo_radius: 3
ignored_obstacle_with_photo_radius: 3
attributes:
- calibration_points
- charger
- cleaned_rooms
- country
- goto
- goto_path
- goto_predicted_path
- image
- is_empty
- map_name
- no_go_areas
- no_mopping_areas
- obstacles
- ignored_obstacles
- obstacles_with_photo
- ignored_obstacles_with_photo
- path
- room_numbers
- rooms
- vacuum_position
- vacuum_room
- vacuum_room_name
- walls
- zones
scan_interval:
seconds: 10
auto_update: true
store_map_raw: false
store_map_image: true
store_map_path: "/tmp"
force_api: xiaomi| Key | Type | Required | Value | Description |
|---|---|---|---|---|
platform |
string | true | xiaomi_cloud_map_extractor |
Name of a platform |
host |
string | true | 192.168.0.123 |
IP address of a vacuum |
token |
string | true | ghjhca3ykg8o2zyyj7xb5adamhgsypel |
Token of a vacuum |
username |
string | true | [email protected] |
Username (email or user ID) used to connect to Xiaomi cloud (the account used in the Xiaomi Home app) |
password |
string | true | aVerySecretPassword |
Password used to connect to Xiaomi cloud (the account used in the Xiaomi Home app) |
name |
string | false | Desired name of camera entity | |
country |
string | false | One of: cn, de, us, ru, tw, sg, in, i2 |
Server used in Xiaomi cloud. Leave empty if you are not sure. |
colors |
map | false | Colors configuration (see below) | |
room_colors |
map | false | Room colors configuration (see below) | |
draw |
list | false | List of elements to draw on a map (see below) | |
texts |
list | false | List of texts to draw on a map (see below) | |
map_transformation |
map | false | Parameters of map transformation (see below) | |
sizes |
map | false | Sizes of map's elements (see below) | |
attributes |
list | false | List of desired entity attributes (see below) | |
scan_interval |
interval | false | default: 5 seconds |
Interval between map updates (documentation) |
auto_update |
boolean | false | default: true |
Activation/deactivation of automatic map updates. (see below) |
store_map_raw |
boolean | false | default: false |
Enables storing raw map data in store_map_path directory (more info). Xiaomi map can be opened with RoboMapViewer. |
store_map_image |
boolean | false | default: false |
Enables storing map image in store_map_path path with name map_image_<device_model>.png |
store_map_path |
string | false | default: /tmp |
Storing map data directory |
force_api |
string | false | One of: xiaomi, viomi, roidmi, dreame |
Forces usage of specific API. |
Each color is represented by a list of 3 or 4 parameters: [red, green, blue] or [red, green, blue, alpha].
Each parameter is a number from a range 0-255 and can be also provided as a HEX value: [0x12, 0xAF, 0xC5] matches #12AFC5.

| Color name | Description |
|---|---|
color_charger |
Charger fill |
color_charger_outline |
Charger outline |
color_cleaned_area |
Fill of area that already has been cleaned |
color_goto_path |
Path for goto mode |
color_grey_wall |
Obstacles (e.g. chairs, table legs) |
color_ignored_obstacle_with_photo |
Ignored obstacle with photo mark on a map |
color_ignored_obstacle |
Ignored obstacle mark on a map |
color_map_inside |
Map inside (for software without rooms support) |
color_map_outside |
Map outside |
color_map_wall_v2 |
Walls (for software with rooms support) |
color_map_wall |
Walls (for software without rooms support) |
color_new_discovered_area |
Newly discovered areas |
color_no_go_zones_outline |
Outline of no-go zones |
color_no_go_zones |
Fill of no-go zones |
color_no_mop_zones_outline |
Outline of no-mopping zones |
color_no_mop_zones |
Fill of no-mopping zones |
color_obstacle_with_photo |
Obstacle with photo mark on a map |
color_obstacle |
Obstacle mark on a map |
color_path |
Path of a vacuum |
color_predicted_path |
Predicted path to a point in goto mode |
color_robo |
Vacuum fill |
color_robo_outline |
Vacuum outline |
color_room_names |
Room names (if available) |
color_scan |
Areas not assigned to any room (for software with rooms support) |
color_unknown |
Other areas |
color_virtual_walls |
Virtual walls |
color_zones_outline |
Outline of areas selected for zoned cleaning |
color_zones |
Fill of areas selected for zoned cleaning |
This section contains mapping between room numbers and colors.
Each color is represented by a list of 3 or 4 parameters: [red, green, blue] or [red, green, blue, alpha].
Each parameter is a number from a range 0-255 and can be also provided as a HEX value: [0x12, 0xAF, 0xC5] matches #12AFC5.
A list of features to be drawn on a map. If all features should be drawn it can be replaced with:
draw: ["all"]Available values:
chargercleaned_areagoto_pathignored_obstacles_with_photoignored_obstaclesno_go_zonesno_mopping_zonesobstacles_with_photoobstaclespathpredicted_pathroom_namesvacuum_positionvirtual_wallszones
Each list entry must obey a following schema. You can get a list of available fonts by executing this command:
fc-list | grep ttf | sed "s/.*\///"| sed "s/ttf.*/ttf/"| Parameter | Type | Required | Default value | Description |
|---|---|---|---|---|
text |
string | true | Text to draw on a map | |
x |
float | true | X position of a text (in percents) | |
y |
float | true | Y position of a text (in percents) | |
color |
list | false | black | Desired color of a text, formatted like here |
font |
string | false | Name of a font to use | |
font_size |
int | false | Size of a font |
| Parameter | Type | Required | Default value | Description |
|---|---|---|---|---|
scale |
float | false | 1 | Scaling factor for a map. |
rotate |
integer | false | 0 | Angle of map rotation. Available values: [0, 90, 180, 270] |
trim |
map | false | 0 | Map trimming configuration. Each trimming direction is in percents: value 25 means trimming of quarter of image size in a given dimension. Available keys: [left, right, top, bottom] |
| Parameter | Type | Required | Default value | Description |
|---|---|---|---|---|
charger_radius |
float | false | 6 | Radius of a charger circle. |
vacuum_radius |
float | false | 6 | Radius of a vacuum semi-circle. |
obstacle_radius |
float | false | 3 | Radius of an obstacle circle. |
ignored_obstacle_radius |
float | false | 3 | Radius of an ignored obstacle circle circle. |
obstacle_with_photo_radius |
float | false | 3 | Radius of an obstacle with photo circle. |
ignored_obstacle_with_photo_radius |
float | false | 3 | Radius of an ignored obstacle with photo circle. |
path_width |
float | false | 1 | Width of path line. |
A list of attributes that an entity should have. Available values:
calibration_points- Calculated calibration points for Lovelace Xiaomi Vacuum Map card.
chargercleaned_roomscountrygoto_pathgoto_predicted_pathgotoignored_obstacles_with_photoignored_obstaclesimageis_emptymap_nameno_go_areasno_mopping_areasobstacles_with_photoobstaclespathroom_numbersroomsvacuum_positionvacuum_room_namevacuum_roomwallszones
Camera image is updated every 5s by default.
It can be disabled in config using auto_update property.
You can also disable and enable automatic updates using services camera.turn_off, camera.turn_on.
If automatic updates are disabled you can manually trigger update using homeassistant.update_entity service.
You can change interval of automatic updates using scan_interval setting (documentation)
If you want to disable map updates when a vacuum is not running you can use this blueprint.

This integration was tested on following vacuums:
- Xiaomi map format:
rockrobo.vacuum.v1(Xiaomi Vacuum Gen 1, Mi Robot Vacuum, SDJQR01RR, SDJQR02RR)roborock.vacuum.m1s(Xiaomi Mi Robot 1S)roborock.vacuum.s4(Roborock S4)roborock.vacuum.s5(Roborock S5)roborock.vacuum.s5e(Roborock S5 Max)rockrobo.vacuum.s6(Roborock S6)roborock.vacuum.a08(Roborock S6 Pure)roborock.vacuum.a10(Roborock S6 MaxV)roborock.vacuum.a15(Roborock S7)roborock.vacuum.a19(Roborocka S4 Max)roborock.vacuum.a27(Roborock S7 MaxV)
- Viomi map format:
viomi.vacuum.v6(Viomi Vacuum V2 Pro, Xiaomi Mijia STYJ02YM, Mi Robot Vacuum Mop Pro)viomi.vacuum.v7(Mi Robot Vacuum-Mop Pro)viomi.vacuum.v8(Mi Robot Vacuum-Mop Pro)viomi.vacuum.v13(Viomi V3)
- Roidmi map format:
roidmi.vacuum.v60(Roidmi EVE Plus)viomi.vacuum.v18(Viomi S9)zhimi.vacuum.xa1(Lydsto R1)
- Dreame map format:
dreame.vacuum.mc1808(Xiaomi Mi Mop/Xiaomi Mijia 1C)dreame.vacuum.p2008(Dreame F9)dreame.vacuum.p2009(Dreame D9)dreame.vacuum.p2028(Dreame Z10 Pro)dreame.vacuum.p2029(Dreame L10 Pro)dreame.vacuum.p2036(Trouver LDS Cleaner)dreame.vacuum.p2041o(Xiaomi Mop 2 Pro+)dreame.vacuum.p2140(Mijia Robot Vacuum-Mop 2C)dreame.vacuum.p2157(MOVA L600)dreame.vacuum.p2259(Dreame D9 Max)
When store_map_raw: true is added to your config this integration will store a raw map file in /tmp directory.
If you don't use Core installation (installation types) you can retrieve this file in the following way:
- In SSH & Terminal add-on enable protected access
- Open terminal and use the following command to copy file:
docker exec homeassistant bash -c "mkdir -p /config/tmp/ && cp /tmp/map_* /config/tmp/" - Map file will appear in
tmpfolder in yourconfigfolder
To enable debug logging add following section to your configuration.yaml
logger:
default: info
logs:
custom_components.xiaomi_cloud_map_extractor: debugThis integration wouldn't exist without following projects:
- openHAB miIO add-on by @marcelrv
- valeCLOUDo by @Xento
- Xiaomi Robot Vacuum Protocol by @marcelrv
- Valetudo by @Hypfer
