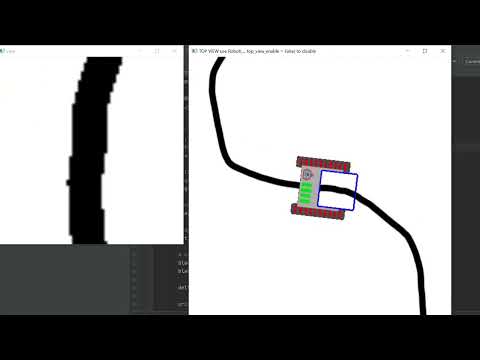
this is a simulation of a robot with a camera for the RoboCup recue line competition
you can use this to speed up the development of your robot, and/or start coding before the robot is completed
the program that me and my them used to won first place in the world championship was 90% written in this simulation

here is a video example of how to expect from the simulation
you first need to install opencv and numpy by running the following commands:
pip install opencv-python
pip install numpy
then just clone the repository and import the Robot class from the robot_simulation.py file
then you can use the built-in functions to develop the program, see the example_1.py file
the robot is highlight customizable to better fit your needs... you can customize things like the width and speed of the robot, the dimension and position of the camera and many more.
do customize your robot yuo need to pass the respective parameter to the robot constructor, the documentation is in the code here
if you want more details on how our original program work, you can find a full explanation here
I will group here the links to the questions that I have received over the years, as I think they can be a useful resource.