This repository contains source code implementing dynamics simulation of a tensegrity aerial vehicle colliding with a flat obstacle, such as a concrete wall. The code can be used to verify the design of icosahedron protection shells protecting aerial vehicles in the form of quadcopters.
The detail of the simulation is described in the paper "Design and control of a collision-resilient aerial vehicle with an icosahedron tensegrity structure" submitted to IEEE/ASME Transactions on Mechatronics (TMECH). A manuscript draft can be accessed here).
This work is evolved from our previous IROS 2020 paper.
Contact: Clark Zha ([email protected]) High Performance Robotics Lab, Dept. of Mechanical Engineering, UC Berkeley
The code uses following common python packages:
numpy, scipy, matplotlib, seaborn
If you want to generate videos for your simulation result, you additionally need:
ffmpeg
In addition, the code uses py3dmath for 3D vector computation. For the ease of usage, we include a copy of the package in this repository so no additional installation is required.
We also provide a conda environment file to help with the environment setup process. Simply run
conda env create -f environment.yml
with the provided yml file in your terminal to setup a proper python environment to run the code.
To visualize a tensegrity vehicle structure:
python plot_vehicles.py
To visualize a tensegrity vehicle side by side with a propeller-guard vehicle for comparison:
python plot_tensegrity_vehicle.py
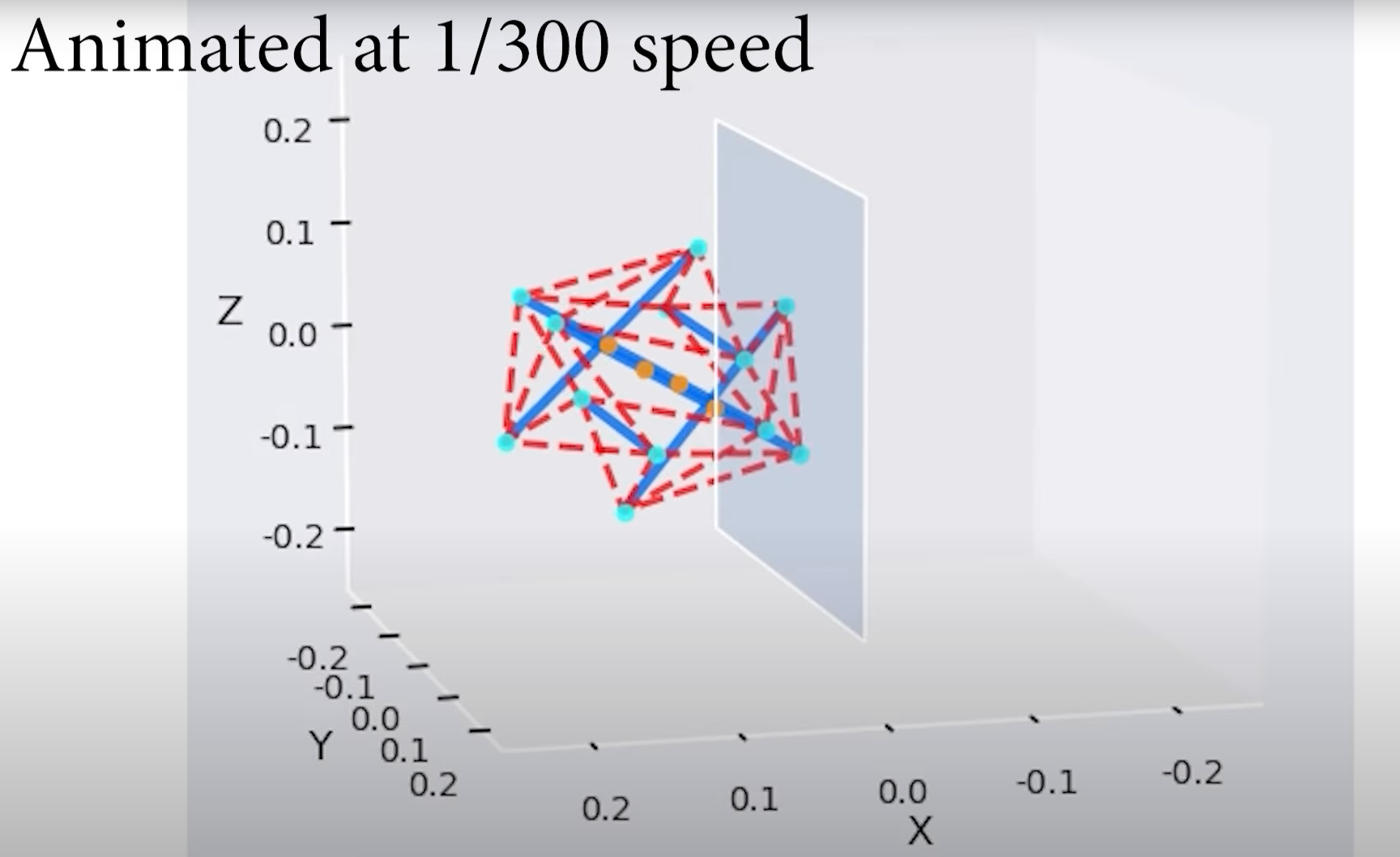
To run an example simulation of a tensegrity vehicle colliding into a wall:
python sim_tensegrity_wall_collision.py
In addition, the "Tensegrity VS Propeller-guard Monte Carlo Study" in the paper can be conducted by running:
mkdir MonteCarloResult
mkdir AnalysisResultPaper
python monte_carlo_experiment.py
python monte_carlo_prepare_data.py
Notice that you need write permission to the the generated folders to store pickle files generated by the simulation code. In addition, this will take a relatively long computation time as more than 2000 (possibly stiff) ODEs with non-trivial dimensions are solved. We recommend you to start with a smaller scale experiment by changing the parameter "sampleSize" in both python scripts.
We have provided the data for analysis used in paper in the /AnalysisResultPaper folder.
To plot the data, run
python monte_carlo_analysis.py
python monte_carlo_scale_analysis.py
to generate the results of maximum stress analysis and scale analysis.
Notice that by setting usePreparedData = False in python monte_carlo_analysis.py, you can use the newly created data generated in the previous step, instead of the provided data.
To create and test your own tensegrity vehicle, you can change parameters like size, weight, material, etc. in
problem_setup.py
You can also adjust initial orientation and speed of the tesegrity in the wall collision experiment by modifying the setup section in
simulation_tensegrity_wall_collision.py
Co-authors of the paper: Xiangyu Wu, Ryan Dimick, Mark. W. Mueller
Collaborators who have contributted to the tensegrity aerial vehicle developement: Joey Kroeger, Natalia Perez
Scholars who have provided their insights on the tensegrity aerial vehicle: Alice Agogino, Alan Zhang, Douglas Hutchings, Kévin Garanger