The codebase for the paper "Improving Trust Estimation in Human-Robot Collaboration Using Beta Reputation at Fine-grained Timescales", published in the 2025 IEEE Robotics and Automation Letters (RA-L).
Resul Dagdanov, Milan Andrejevic, Dikai Liu, Chin-Teng Lin
Follow ReadMe File for Experiments and Source Code
@article{dagdanov2025improving,
author = {Dagdanov, Resul and Andrejevi{\'c}, Milan and Liu, Dikai and Lin, Chin-Teng},
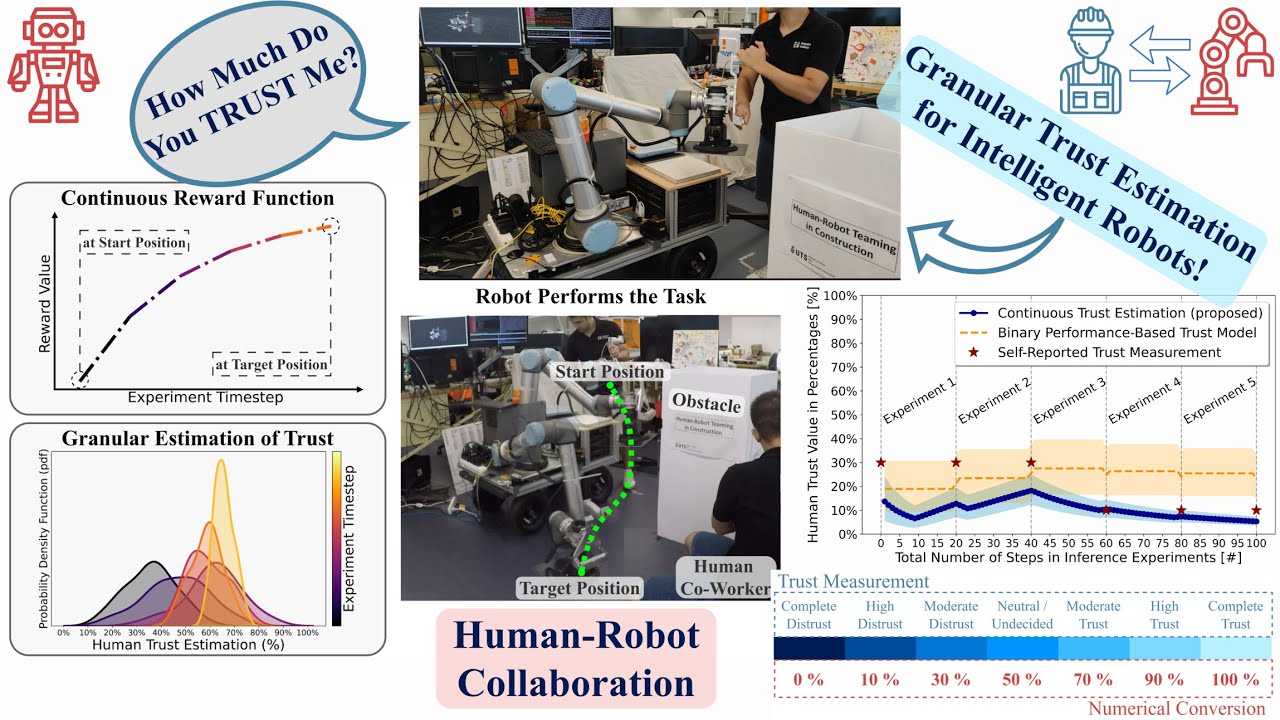
title = {Improving Trust Estimation in Human-Robot Collaboration Using Beta Reputation at Fine-Grained Timescales},
journal = {IEEE Robotics and Automation Letters},
year = {2025},
volume = {10},
number = {8},
pages = {8562--8569},
doi = {10.1109/LRA.2025.3585653}
}






