A collection of packages containing autonomous functionalities for Husarion UGV vehicles.
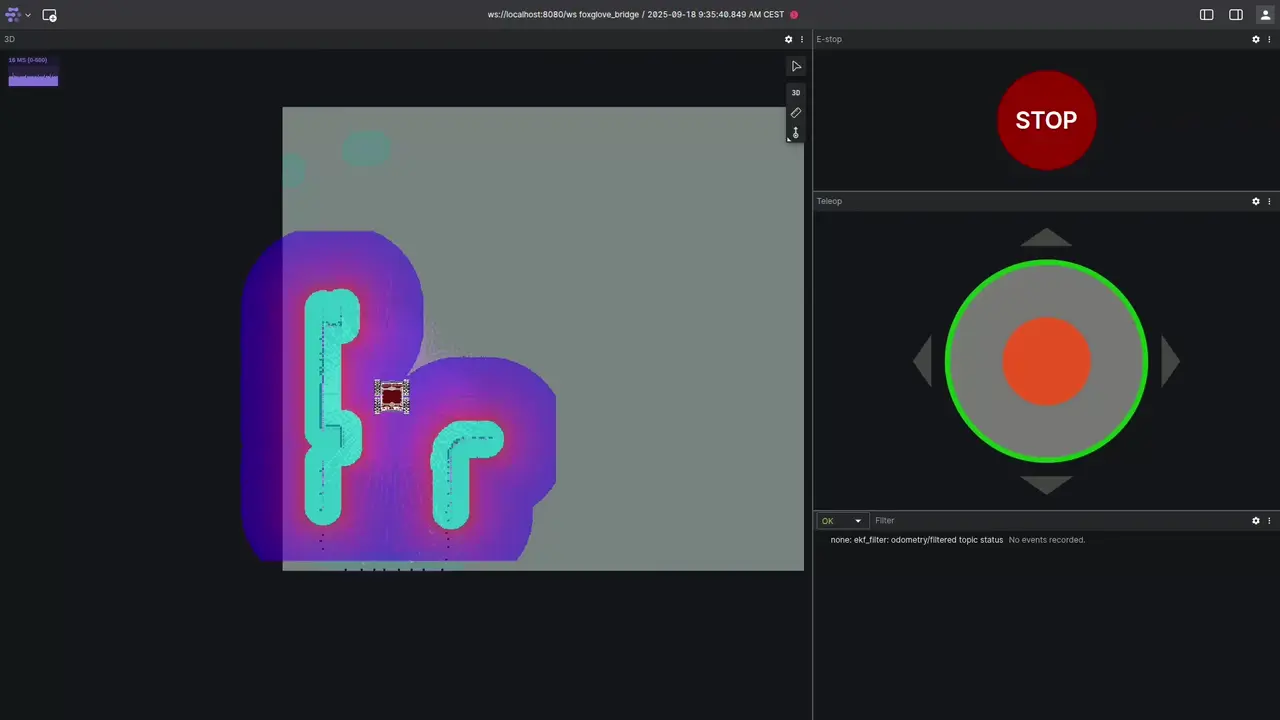
Below are two articles describing how to run the autonomy demo — one in simulation and the other on a physical robot. We recommend starting with the simulation demo, as it lets you explore the autonomy features without the need to configure or interact with the actual hardware.