X‐Drive Controller
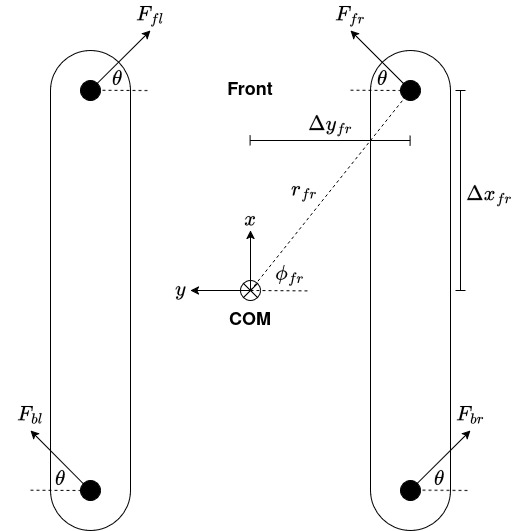
We define the force from a given thruster
where
For a given target velocity, the forces are at equilibrium, so
The force from each thruster is approximately proportional to the control input, so
where
and
Since the equation above is underdetermined (more variables than equations), there are multiple solutions to the problem. Thus, we formulate this equation into an optimization problem to find the solution with minimum norm using the python scipy library:
[1] D. A. Klahn, “Design and Implementation of Control and Perception Subsystems for an Autonomous Surface Vehicle for Aquaculture,” Mit.edu, Jun. 2023, doi: https://hdl.handle.net/1721.1/151394.